| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
gama-localThe input data format for a local geodetic network adjustment (program
gama-local) is defined in accordance with the definition of Extended
Markup Language (XML) for description of structured data.
The XML definition can be found at
Input data (points, observations and other related information) are
described using XML start-end pair tags <xxx> and </xxx>
and empty-element tags <xxx/>.
The syntax of XML gama-local input format is described in XML
schema (XSD), the file gama-local.xsd is a part of the
GNU gama distribution and can formally be validated
independently on the program gama-local, namely in unit testing
we use xmllint validating parser, if it is installed.
For parsing the XML input data, gama-local uses the XML parser
Expat copyrighted by James Clark which is described at
http://www.jclark.com/xml/expat.html
Expat is subject to the Mozilla Public License (MPL), or may
alternatively be used under the GNU General Public License (GPL)
instead.
In the gama-local XML input, distances are given in meters,
angular values in centigrades and their standard deviations (rms
errors) in millimeters or centigrade seconds, respectively.
Alternatively angular values in gama-local XML input can be
given in degrees and seconds (see section Angular units). At the end of
this chapter an example of the gama-local XML input data
object is given.
| 2.1 Angular units | ||
| 2.2 Prologue | XML declaration | |
2.3 Tags <gama-local> and <network> | ||
| 2.4 Network description | Tag <description>
| |
| 2.5 Network parameters | Tag <parameters />
| |
| 2.6 Points and observations | Tag <points-observations>
| |
| 2.7 Points | Tag <point />
| |
| 2.8 Set of observations | Tag <obs>
| |
| 2.9 Directions | Tag <direction />
| |
| 2.10 Horizontal distances | Tag <distance />
| |
| 2.11 Angles | Tag <angle />
| |
| 2.12 Slope distances | Tag <s-distance />
| |
| 2.13 Zenith angles | Tag <z-angle />
| |
| 2.14 Azimuths | Tag <azimuth />
| |
| 2.15 Height differences | Tag <height-differences>
| |
| 2.16 Control coordinates | Tag <coordinates>
| |
| 2.17 Coordinate differences (vectors) | Tag <vectors>
| |
2.18 Attribute extern | ||
| 2.19 Example of local geodetic network | A complete example of a network |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Horizontal angles, directions and zenith angles in gama-local
XML adjustment input are implicitly given in gons and their standard
deviations and/or variances in centicentigons. Gon, also called
centesimal grade and Neugrad (German for new grad), is 1/400-th of the
circumference. For example
<direction from="202" to="416" val="63.9347" stdev="10.0" /> |
The same angular value (direction) can be expressed in degrees (sexagesimal graduation) as
<direction from="202" to="416" val="57-32-28.428" stdev="3.24" /> |
In XML adjustment input degrees are coded as a single string, where degrees (57), minutes (32) and seconds (28.428) are separated by dashes (-) with optional leading sign. Spaces are not allowed inside the string. Gons and degrees may be mixed in a single XML document but one should be careful to supply the information on standard deviations and/or covariances in the proper corresponding units.
Sexagesimal seconds (ss) are commonly called arcseconds, they are related to the metric system centicentigons (cc) as
ss = cc/400/100/100 * 360*60*60 = cc*0.324.
Internally gama-local works with gons but output can be
transformed to degrees using the option --angular 360.
Another angular unit commonly used in surveying is the milligon (mgon), 1 mgon = 1 gon/1000 (similarly as 1 mm = 1 m/1000) and 10 cc = 1 mgon.
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
XML documents begin with an XML declaration that specifies the version
of XML being used (prolog). In the case of gama-local
follows the root tag <gama-local> with XML Schema namespace
defined in attribute xmlns:
<?xml version="1.0" ?> <gama-local xmlns="http://www.gnu.org/software/gama/gama-local"> |
GNU Gama uses non-validating parser and the XML Schema Definition
namespace is not used in gama-local but it is essential for
usage in third party software that might need XML validation.
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
<gama-local> and <network>A pair tag <gama-local> contains a single pair tag <network>
that contains the network definition. The definition of the network is
composed of three sections:
<description> of the network (annotation or comments),
<parameters /> and
<points-observations> section.
The sections <description> and <parameters /> are
optional, the section <points-observations> is mandatory. These
three sections may be presented in any order and may be repeated several
times (in such a case, the corresponding sections are linked
together by the software).
The pair tag <network> has two optional attributes axes-xy
and angles. These attributes are used to describe orientation of
the xy orthogonal coordinate system axes and the orientation of the
observed angles and/or directions.
axes-xy="ne" orientation of axes x and y; value
ne implies that axis x is oriented north and axis y
is oriented east. Acceptable values are ne, sw,
es, wn for left-handed coordinate systems and en,
nw, se, ws for right-handed coordinate systems
(default value is ne).
angles="right-handed" defines counterclockwise observed angles
and/or directions, value left-handed defines clockwise observed
angles and/or directions (default value is left-handed).
Many geodetic systems are right handed with x axis oriented
east, y axis oriented north and counterclockwise angular
observations. Example of left-handed orthogonal system with different
axes orientation is coordinate system Krovak used in the Czech
Republic where the axes x and y are oriented south and
west respectively.
GNU Gama can adjust any combination of coordinate and angular systems.
<gama-local> <network> <description> ... </description> <parameters ... /> <points-observations> ... </points-observations> </network> </gama-local> |
It is planned in future versions of the program to allow more
<network> tags (analysis of deformations etc.) and definitions of
new tags.
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
The description of a geodetic network is enclosed in the start-end pair
tags <description>. Text of the description is copied into the
adjustment output and serves for easier identification of results. The
text is not interpreted by the program, but it may be helpful for users.
<description> A short description of a geodetic network ... </description> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
The network parameters may be listed with the following optional
attributes of an empty-element tag <parameters />
sigma-apr = "10" value of a priori reference standard
deviation—square root of reference variance (default value 10)
conf-pr = "0.95" confidence probability used in statistical
tests (dafault value 0.95)
tol-abs = "1000" tolerance for identification of gross
absolute terms in project equations (default value 1000 mm)
sigma-act = "aposteriori" actual type of reference standard deviation
use in statistical tests (aposteriori | apriori); default value
is aposteriori
algorithm = "gso" numerical algortihm used in the adjistment
(gso, svd, cholesky, envelope).
languade = "en" the language to be used in adjustment output.
encoding = "utf-8" adjustment output encoding.
angular = "400" output results angular units (400/360).
latitude = "50"
ellipsoid
cov-band = "-1" the bandwith of covariance matrix of the
adjusted parameters in the output XML file (-1 means all covariances).
Values of the attributes must be given either in the double-quotes
("…") or in the single quotes ('…'). There
can be white spaces (spaces, tabs and new-line characters)
between attribute names, values, and the equal sign.
<parameters sigma-apr = "15"
conf-pr = '0.90'
sigma-act = "apriori" />
|
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
The points and observations section is bounded by the pair tag
<points-observations> and contains information about points,
observed horizontal directions, angles, and horizontal distances, height
differences, slope distances, zenith angles, observed vectors and
control coordinates.
Optional attributes of the start tag <points-observations> allow
for the definition of default values of standard deviations
corresponding to observed directions, angles, and distances.
direction-stdev = "…" defines the implicit value of
standard deviation of observed directions (default value is not
defined)
angle-stdev = "…" defines the implicit value of standard
deviation of observed angles (default value is not defined)
zenith-angle-stdev = "…" defines the implicit value of
standard deviation of observed zenith angles (default value is not
defined)
azimuth-stdev = "…" defines the implicit value of
standard deviation of observed azimuth angles (default value is not
defined)
distance-stdev = "…" defines the implicit value of
standard deviation of observed distances, horizontal or slope (default
value is not defined)
Implicit values of standard deviations for the observed distances are calculated from the model with three constants a, b, and c according to the formula
a + bD^c,
where a is a constant part of the model and D is the observed distance in kilometres. If the constants b and/or c are not given, default values b=0 and c=1 will be used.
<points-observations direction-stdev = "10"
distance-stdev = "5 3 1" >
<!-- ... points and observation data ... -->
</points-observations>
|
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Points are described by the empty-element tags <point/> with the
following attributes:
id = "…" is the point identification attribute (mandatory);
point identification is not limited to numbers; all printable
characters can be used in identification.
x = "…" specifies coordinate x
y = "…" specifies coordinate y
z = "…" specifies coordinate z, point height
fix = "…" specifies coordinates that are fixed in
adjustment; acceptable values are xy, XY, z,
Z, xyz, XYZ, xyZ and XYz.
adj = "…" specifies coordinates to be adjusted (unknown
parameters in adjustment); acceptable values are xy, XY,
z, Z, xyz, XYZ, xyZ and XYz.
With exception of the first attribute (point id), all other attributes are optional. Decimal numbers can be used as needed.
Control coordinates marked using the fix parameter are not
changed in the adjustment. Uppercase and lowercase notation of
coordinates with the fix parameter are interpreted the same.
Corrections are applied to the unknown parameters identified by
coordinates written in lowercase characters given in the adj
parameter. When the coordinates are written using uppercase, they are
interpreted as constrained coordinates. If coordinates are marked
with both the fix and adj, the fix parameter will
take precedence.
Constrained coordinates are used for the regularization of free networks. If the network is not free (fixed network), the constrained coordinates are interpreted as other unknown parameters. In classical free networks, the constrained points define the regularization constraint
\sum dx^2_i+dy^2_i = \min.
where dx and dy are adjusted coordinate corrections and
the summation index i goes over all constrained points.
In other words, the set of the constrained points defines the
adjustment of the free network (its shape and size) with a
simultaneous transformation to the approximate coordinates of selected
points. Program gama-local allows the definition of
constrained coordinates with 1D leveling networks, 2D and 3D local
networks.
<point id="1" y="644498.590" x="1054980.484" fix="xy" /> <point id="2" y="643654.101" x="1054933.801" adj="XY" /> <point id="403" adj="xy" /> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
The pair tag <obs> groups together a set of observations which
are somehow related. A typical example is a set of directions and
distances observed from one stand-point. An observation section
contains a set of
<direction … />
<distance … />
<angle … />
<s-distance … />
<z-angle … />
<azimuth … />
The band variance-covariance matrix of directions, distances, angles
or other observations
listed in one <obs> section may be supplied using a
<cov-mat> pair tag with attributes dim (dimension) and
band (bandwidth). The band-width of the diagonal matrix is equal
to 0 and a fully-populated variance-covariance matrix has a bandwidth of
dim-1.
Observation variances and covariances (i.e. an upper-symmetric part of
the band-matrix) are written row by row between <cov-mat> and
</cov-mat> tags. If present, the dimension of the
variance-covariance matrix must agree with the number of observations.
The following example of variance-covariance matrix with dimension 6 and bandwidth 2 (two nonzero codiagonals and three zero codiagonals)
[ 1.1 0.1 0.2 0 0 0 0.1 1.2 0.3 0.4 0 0 0.2 0.3 1.3 0.5 0.6 0 0 0.4 0.5 1.4 0.7 0.8 0 0 0.6 0.7 1.5 0.9 0 0 0 0.8 0.9 1.6 ] |
is coded in XML as
<cov-mat dim="6" band="2">
1.1 0.1 0.2
1.2 0.3 0.4
1.3 0.5 0.6
1.4 0.7 0.8
1.5 0.9
1.6
</cov-mat>
|
If two or more sets of directions with different orientations are
observed from a stand-point, they must be placed in different <obs>
sections. The value of an orientation angle can be explicitly stated
with an attribute orientation="…". Normally, it is more
convenient to let the program calculate approximate values of
orientations needed for the adjustment. If directions are present, then
the attribute station must be defined.
Optional attribute from_dh="…" enables to enter implicit
height of instrument for all observations within the <obs> pair
tag.
Observed distances are expressed in meters, their standard deviations in millimeters. Observed directions and angles are expressed in centigrades (400) and their standard deviations in centigrade seconds.
<obs from="418">
<direction to= "2" val="0.0000" stdev="10.0" />
<direction to="416" val="63.9347" stdev="10.0" />
<direction to="420" val="336.3190" stdev="10.0" />
<distance to="420" val="246.594" stdev="5.0" />
</obs>
<obs from="418">
<direction to= "2" val="0.0000" />
<direction to="416" val="63.9347" />
<direction to="420" val="336.3190" />
<distance to="420" val="246.594" />
<cov-mat dim="4" band="0">
100.00 100.00 100.00 25.00
</cov-mat>
</obs>
|
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Directions are expressed with the following attributes in an
empty-element tag <direction />
to = "…" target point identification
val = "…" observed direction; see section Angular units
stdev = "…" standard deviation (optional)
from_dh = "…" instrument height (optional)
to_dh = "…" reflector/target height (optional)
The standard deviation is an optional attribute. However since all
observations in the adjustment must have their weights defined, the
standard deviation must be given either explicitly with the attribute
stdev="…" or implicitly with <points-observation
direction-stdev="…" > or with a variance-covariance matrix for
the given observation set. A similar approach applies to all the
observations (distances, angles, etc.)
All directions in the given <obs> tag (see section Set of observations) share a common orientation shift, which is an
implicit adjustment unknown parameter defining relation between the
stand point directions and bearings
direction_AB + orientation shift_A = bearing_AB.
Because one <obs> tag defines one orientation shift for all its
directions, stand point id must be given in the <obs
from="id"> tag, using attribute from, which in turn must not be
used in <direction /> tags, to avoid unintentional discrepancies.
<direction to= "2" val="0.0000" stdev="10.0" /> <direction to="416" val="63.9347" /> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Distances are written using an empty-element tag <distance />
with attributes
from = "…" standpoint identification
to = "…" target identification
val = "…" observed horizontal distance
stdev = "…" standard deviation of observed horizontal
distance (optional)
from_dh = "…" instrument height (optional)
to_dh = "…" reflector/target height (optional)
Contrary to directions, distances in an observation set
(<obs>) do not need to share a common stand-point. An example is
set of distances observed from several stand-points with
a common variance-covariance matrix.
<distance from = "2" to = "1" val = "659.184" /> <distance to ="422" val="228.207" stdev="5.0" /> <distance to ="408" val="568.341" /> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Observed angles are expressed with the following attributes of an
empty-element tag <angle />
from = "…" standpoint identification (optional)
bs = "…" backsight target identification
fs = "…" foresight target identification
val = "…" observed angle; see section Angular units
stdev = "…" standard deviation (optional)
from_dh = "…" instrument height (optional)
bs_dh = "…" backsight reflector/target height (optional)
fs_dh = "…" foresight reflector/target height (optional)
Similar to distance observations, one observation set may group angles observed from several standpoints.
<angle from="433" bs="422" fs="402" val="128.6548" stdev="14.1"/> <angle from="433" bs="422" fs="402" val="128.6548" /> <angle bs="422" fs="402" val="128.6548" stdev="14.1"/> <angle bs="422" fs="402" val="128.6548"/> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Slope distances (space distances) are written using an empty-element tag
<s-distance /> with attributes
from = "…" standpoint identification (optional)
to = "…" target identification
val = "…" observed slope distance
stdev = "…" standard deviation of observed slope distance
(optional)
from_dh = "…" instrument height (optional)
to_dh = "…" reflector/target height (optional)
Similar to horizontal distances, one observation set may group slope distances observed from several standpoints.
<s-distance from = "2" to = "1" val = "658.824" /> <s-distance to ="422" val="648.618" stdev="5.0" /> <s-distance to ="408" val="482.578" /> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Zenith angles are written using an empty-element tag <z-angle />
with the following attributes
from = "…" standpoint identification (optional)
to = "…" target identification
val = "…" observed zenith angle; see section Angular units
stdev = "…" standard deviation of observed zenith angle
(optional)
from_dh = "…" instrument height (optional)
to_dh = "…" reflector/target height (optional)
Similar to horizontal distances, one observation set may group zenith angles observed from several standpoints.
<z-angle from = "2" to = "1" val = "79.6548" /> <z-angle to ="422" val="85.4890" stdev="5.0" /> <z-angle to ="408" val="95.7319" /> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
The azimuth is defined in GNU Gama as an observed horizontal angle
measured from the North to the given target. The true north
orientation is measured by gyrotheodolites, mainly in mine
surveying. In Gama azimuths’ angle can be measured clockwise or
counterclocwise according to the angle orientation defined in
<parameters /> tag.
Azimuths are expressed with the following attributes in an
empty-element tag <azimuth />
from = "…" standpoint identification
to = "…" target point identification
val = "…" observed azimuth; see section Angular units
stdev = "…" standard deviation (optional)
from_dh = "…" instrument height (optional)
to_dh = "…" reflector/target height (optional)
The standard deviation is an optional attribute. However since all
observations in the adjustment must have their weights defined, the
standard deviation must be given either explicitly with the attribute
stdev="…" or implicitly with <points-observation
azimuth-stdev="…" > or with a variance-covariance matrix for
the given observation set.
<points-observations azimuth-stdev="15.0"> <azimuth from="1" to= "2" val= "96.484371" /> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
A set of observed leveling height differences is described using the
start-end tag <height-differences> without parameters. The
<height-differences> tag can contain a series of height
differences (at least one) and can optionally be supplied with a
variance-covariance matrix. Single height differences are defined with
empty tags <dh /> having the following attributes:
from = "…" standpoint identification
to = "…" target identification
val = "…" observed leveling height difference
stdev = "…" standard deviation of levellin elevation and
dist = "…" distance of leveling section (in kilometers)
If the value of standard deviation is not present and length of leveling section (in kilometres) is defined, the value of standard deviation is computed from the formula
m_dh = m_0 sqrt(D_km)
If the value of standard deviation of the height difference is defined, information on leveling section length is ignored. A third possibility is to define a common variance-covariance matrix for all elevations in the set.
<height-differences> <dh from="A" to="B" val=" 25.42" dist="18.1" /> <dh from="B" to="C" val=" 10.34" dist=" 9.4" /> <dh from="C" to="A" val="-35.20" dist="14.2" /> <dh from="B" to="D" val="-15.54" dist="17.6" /> <dh from="D" to="E" val=" 21.32" dist="13.5" /> <dh from="E" to="C" val=" 4.82" dist=" 9.9" /> <dh from="E" to="A" val="-31.02" dist="13.8" /> <dh from="C" to="D" val="-26.11" dist="14.0" /> </height-differences> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Control (known) coordinates are described by the start-end pair tag
<coordinates>. A series of points with known coordinates can be
defined using the <point /> tag. The variance-covariance matrix
for the entire set of points can be created with a single
<cov-mat> tag. In the <point /> tags, a point
identification (ID) and its coordinates (x, y and z) must be listed.
Although the order of the <point /> tag attributes is irrelevant
in the corresponding variance-covariance matrix, the expected order of
the coordinates is x, y and z (the horizontal coordinates x, y, or the
height z might be missing, but not both). The type of the points may be
defined either directly within the <coordinates> tag or outside
of it.
<coordinates>
<point id="1" x="100.00" y="100.00" />
<point id="2" z="200.00" y="200.00" x="200.00" />
<point id="3" z="300.00" />
<cov-mat dim="6" band="5" >
... <!-- covariances for 1x 1y 2x 2y 2z 3z -->
</cov-mat>
</coordinates>
|
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Observed coordinate differences describe relative positions of station pairs (vectors). Contrary to the observed coordinates, the variance-covariance matrix of the coordinate differences always describes all three elements of the 3D vectors.
Optional attributes of empty element tag <vec> for describing
instrument and/or target height are
from_dh = "…" instrument height
to_dh = "…" target height
<vectors>
<vec from="id1" to="id2" dx="..." dy="..." dz="..." />
<vec from="id2" to="id3" dx="..." dy="..." dz="..." />
...
<cov-mat dim="..." band="..." >
..
</cov-mat>
</vectors>
|
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
externThe attribute extern is available for all observation types,
including <vector extern="..."> and <coordinates
extern="...">. Its values have no impact on processing in
gama-local, it only transferes the attribute values from XML
input into the corresponing XML tags in the adjustment output.
The attribude extern="value" is provided to enable storing
observations’ database keys from an external database system in
gama-local XML adjutement input and output. If you do not have
such an external application, you probably will not need this
attribute.
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
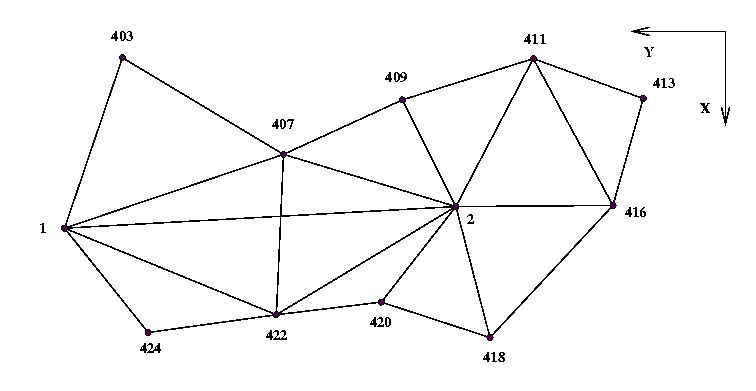
The XML input data format should be now reasonably clear from the following sample geodetic network. This example is taken from user’s guide to Geodet/PC by Frantisek Charamza.
<?xml version="1.0" ?>
<gama-local xmlns="http://www.gnu.org/software/gama/gama-local">
<network axes-xy="sw">
<description>
XML input stream of points and observation data for the program GNU gama
</description>
<!-- parameters are expressed with empty-element tag -->
<parameters sigma-act = "aposteriori" />
<points-observations>
<!-- fixed point, constrained point -->
<point id="1" y="644498.590" x="1054980.484" fix="xy" />
<point id="2" y="643654.101" x="1054933.801" adj="XY" />
<!-- computed / adjusted points -->
<point id="403" adj="xy" />
<point id="407" adj="xy" />
<point id="409" adj="xy" />
<point id="411" adj="xy" />
<point id="413" adj="xy" />
<point id="416" adj="xy" />
<point id="418" adj="xy" />
<point id="420" adj="xy" />
<point id="422" adj="xy" />
<point id="424" adj="xy" />
<obs from="1">
<direction to= "2" val= "0.0000" stdev="10.0" />
<direction to="422" val= "28.2057" stdev="10.0" />
<direction to="424" val= "60.4906" stdev="10.0" />
<direction to="403" val="324.3662" stdev="10.0" />
<direction to="407" val="382.8182" stdev="10.0" />
<distance to= "2" val= "845.777" stdev="5.0" />
<distance to="422" val= "493.793" stdev="5.0" />
<distance to="424" val= "288.301" stdev="5.0" />
<distance to="403" val= "388.536" stdev="5.0" />
<distance to="407" val= "498.750" stdev="5.0" />
</obs>
<obs from="2">
<direction to= "1" val="0.0000" stdev="10.0" />
<direction to="407" val="22.2376" stdev="10.0" />
<direction to="409" val="73.8984" stdev="10.0" />
<direction to="411" val="134.2090" stdev="10.0" />
<direction to="416" val="203.0706" stdev="10.0" />
<direction to="418" val="287.2951" stdev="10.0" />
<direction to="420" val="345.6928" stdev="10.0" />
<direction to="422" val="368.9908" stdev="10.0" />
<distance to="407" val="388.562" stdev="5.0" />
<distance to="409" val="257.498" stdev="5.0" />
<distance to="411" val="360.282" stdev="5.0" />
<distance to="416" val="338.919" stdev="5.0" />
<distance to="418" val="292.094" stdev="5.0" />
<distance to="420" val="261.408" stdev="5.0" />
<distance to="422" val="452.249" stdev="5.0" />
</obs>
<obs from="403">
<direction to= "1" val="0.0000" stdev="10.0" />
<direction to="407" val="313.5542" stdev="10.0" />
<distance to="407" val="405.403" stdev="5.0" />
</obs>
<obs from="407">
<direction to= "1" val="0.0000" stdev="10.0" />
<direction to="403" val="55.1013" stdev="10.0" />
<direction to="409" val="193.3410" stdev="10.0" />
<direction to= "2" val="239.4204" stdev="10.0" />
<direction to="422" val="323.5443" stdev="10.0" />
<distance to="409" val="281.997" stdev="5.0" />
<distance to="422" val="346.415" stdev="5.0" />
</obs>
<obs from="409">
<direction to= "2" val="0.0000" stdev="10.0" />
<direction to="407" val="102.2575" stdev="10.0" />
<direction to="411" val="310.1751" stdev="10.0" />
<distance to="411" val="296.281" stdev="5.0" />
</obs>
<obs from="411">
<direction to= "2" val="0.0000" stdev="10.0" />
<direction to="409" val="49.8647" stdev="10.0" />
<direction to="413" val="291.4953" stdev="10.0" />
<direction to="416" val="337.6667" stdev="10.0" />
<distance to="413" val="252.266" stdev="5.0" />
<distance to="416" val="360.449" stdev="5.0" />
</obs>
<obs from="413">
<direction to="411" val="0.0000" stdev="10.0" />
<direction to="416" val="295.3582" stdev="10.0" />
<distance to="416" val="239.745" stdev="5.0" />
</obs>
<obs from="416">
<direction to= "2" val="0.0000" stdev="10.0" />
<direction to="411" val="68.8065" stdev="10.0" />
<direction to="413" val="117.9922" stdev="10.0" />
<direction to="418" val="348.1606" stdev="10.0" />
<distance to="418" val="389.397" stdev="5.0" />
</obs>
<obs from="418">
<direction to= "2" val="0.0000" stdev="10.0" />
<direction to="416" val="63.9347" stdev="10.0" />
<direction to="420" val="336.3190" stdev="10.0" />
<distance to="420" val="246.594" stdev="5.0" />
</obs>
<obs from="420">
<direction to= "2" val="0.0000" stdev="10.0" />
<direction to="418" val="77.9221" stdev="10.0" />
<direction to="422" val="250.1804" stdev="10.0" />
<distance to="422" val="228.207" stdev="5.0" />
</obs>
<obs from="422">
<direction to= "2" val="0.0000" stdev="10.0" />
<direction to="420" val="26.8834" stdev="10.0" />
<direction to="424" val="225.7964" stdev="10.0" />
<direction to= "1" val="259.2124" stdev="10.0" />
<direction to="407" val="337.3724" stdev="10.0" />
<distance to="424" val="279.405" stdev="5.0" />
</obs>
<obs from="424">
<direction to= "1" val="0.0000" stdev="10.0" />
<direction to="422" val="134.2955" stdev="10.0" />
</obs>
</points-observations>
</network>
</gama-local>
|
| [ << ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
This document was generated on February 17, 2024 using texi2html 1.82.