| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
gama-localAdjustment of local geodetic network is a classical case of adjustment of indirect observations. After estimation of approximate values of unknown parameters (coordinates of points) and linearization of functions describing relations between observations and parameters we solve linear system of equations
(1) Ax = b + v, |
where A is coefficient matrix, b is vector of absolute terms
(right hand side) and v is vector of residuals.
This system is (generally) overdetermined and we seek
the solution x satisfying the basic criterion of Least Squares
(2) v'Pv = min, |
where P is weight matrix. This criterion unambiguously defines the
shape of adjusted network.
Geodetic adjustment is traditionally computed as the solution of normal equations (2)
(a) Nx = n, where N=A'PA and n=A'Pb. |
In the case of free network, i.e. network with no fixed
coordinates (or network without sufficient number of fixed
coordinates), the system (1) is singular, matrix A has linearly
dependent columns, and there is infinite number of solutions x.
To define a unique solution x we need to definine a set of
constriant equations (inner constraints)
(b) Cx = c |
to minimize
(c) v'Pv - 2k'(Cx - c) = min |
where r is the vector of residuals, r = Ax - b, k is a
vector of so called Lagrange multipliers and adjusted vector x
is obtained from solution of
(d) ( A'PA, C') (x) = (A'Pb)
( C, 0 ) (k) = ( c )
|
In gama-local a slightly different approach is used, we define
a second regularization criterion as
(3) \sum x_i^2 = min, for all selected i |
stating that at the same time with (2) we demand that the sum of squares corrections of selected parameters is minimal (corrections of unknown parameters with indexes from the set of all selected unknowns. Geometrically this criterion is equivalent to adjustment of the network according to (2) with simultaneous transformation to the selected set of fiducial points. This transformation does not change the shape of adjusted network.
Often it is advantageous to work with a homogenized system, ie. with the system of project equations in which coefficient of each row and absolute term are multiplied by square root of the weight of corresponding observation.
(4) ~A x = ~b, |
where ~A = P^1/2 A, ~b = P^1/2 A. Symbol P^1/2 denotes diagonal matrix of square roots of observation weights (or Cholesky decomposition of covariance matrix in the case of correlated observations). To criterion (2) corresponds in the case of homogenized system criterion
(5) ~v'~v = min. |
Normal equations are clearly equivalent for both systems.
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
For computation of coefficients in system (1) (ie. during linearization) we need, first of all, an estimate of approximate coordinates of points and approximate values of orientations of observed directions sets.
Approximate values of unknown parameters are usually not known and we
have to compute them from the available observations. For approximate
value of orientation program gama-local uses median of all estimates
from the given set of directions to the points with known coordinates.
Median is less sensitive to outliers than arithmetic mean which is
normally used for approximate estimate of orientations
During the phase of computation of approximate coordinate of points,
program gama-local walks through the list of computed points
and for each point gathers all determining elements pointing to
points with known or previously computed coordinates.
Determining elements are
distance between given and computed points
For all combinations of determining elements program gama-local
computes intersections and estimates approximate coordinates as the
median of all available solutions.
If at least one point was resolved while iterating through the list, the whole cycle is repeated.
If no more coordinates can be solved using intersections and points with unknown coordinates are remaining, program tries to compute coordinates of unresolved points in a local coordinates system and obtain their coordinates using similarity transformation. If a transformation succeeds to resolve coordinates at least one computed point and there are still some points without coordinates left, the whole process is repeated. Classes for computation of approximate coordinates have been written by Jiri Vesely.
If program gama-local fails to compute approximate coordinates
of some of the network points, they are eliminated from the
adjustment and they are listed in the output listing.
With the outlined strategy, program gama-local is able to estimate
approximate coordinates in most of the cases we normally meet in
surveying profession. Still there are cases in which the solution fails.
One example is an inserted horizontal traverse with sets of observed
direction on both ends but without a connecting observed distance. The
solution of approximate coordinates can fail when there is a number of
gross error for example resulting from confusion of point
identifications but in normal situations, leaving computation of
approximate coordinates on program gama-local is recommended.
Computation of approximate coordinates of points ************************************************ Number of points with given coordinates: 2 Number of solved points : 2 Number of observations : 4 ----------------------------------------------------- Successfully solved points : 0 Remaining unsolved points : 2 List of unresolved points ************************* 422 424 |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
One of parameters in XML input of program gama-local is tolerance
tol-abs for detecting of gross absolute terms in
project equations. Observations with outlying absolute terms
are always excluded from adjustment.
For measured distances program tests difference between observed value d_i and distance computed from approximate coordinates d_0
|d_i - d_0| > |
for observed directions program gama-local tests transverse deviation
corresponding to absolute term b_i from
project equations (1)
| b_i | d_0 > |
and similarly for angles, program tests the greater of two deviations corresponding to left and right distances (left and right arm of the angle)
|b_i| max{ d_{0_l}, d_{0_r} } > |
Default value of parameter tol-abs is 1000 mm.
Outlying absolute terms in project equations ******************************************** i standpoint target observed absolute =========================================== value ===== term == 2 103 104 dir. 301.087900 -9989.1 Observations with outlying absolute terms removed |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Program gama-local uses two basic statistical parameters
conf-pr) and
sigma-act).
Confidence probability determines significance level on which statistical tests of adjusted quantities are carried. Actual type of reference standard deviation m0_a specifies whether during statistical analysis we use an a priori reference standard deviation m0 or an a posteriori estimate m0’. On the type of actual reference standard deviation depends the choice of density functions of stochastic quantities in statistical analysis of the adjustment.
The standard deviantion of an adjusted quantity is computed in dependence of the choice of actual type of reference standard deviation m0_a according to formula
m0_a sqrt(q)
where q is the weight coefficient of the corresponding adjusted
unknown parameter or observation. Apart from the standard deviation,
program gama-local computes for the adjusted quantity its
confidence interval in which its real value is located
with the probabilityP.
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Null hypothesis H_0: m0 = m0’ is tested versus alternative hypothesis H_1: m0 neq m0’. Test criterion is ratio of a posteriori estimate of reference standard deviation
m0' = sqrt( v'P v / r). |
and a priori reference standard deviation m0 (input data parameter
m0-apr). For given significance level alpha lower and
upper bounds of interval (L, U) are computed so, that if
hypothesis H_0 is true, probabilities P(m0’/m0
le D) and P(m0’/m0 ge H) are equal to
alpha/2. Lower and upper bounds of the interval are computed as
L = sqrt((Chi^2_{1-alpha/2,r})/r),
U = sqrt((Chi^2_{ alpha/2 ,r})/r).
|
Probability
P(L < m0'/m0 < U) = |
is by default 95%, this corresponds to 5% confidence level test.
Exceeding the upper limit H of the confidence interval can be caused even by a single gross error (one outlying observation). Method of Least Squares is generally very sensitive to presence of outliers. Safely can be detected only one observation whose elimination leads to maximal decrease of a posteriori estimate of reference standard deviation
(6) m0'' = sqrt{(v'P v - delta)/(r-1)},
delta = max(v_i^2/q_vi),
|
where
(7) q_vi = 1/p_i - q_Li |
is weight coefficient of i-th residual. If the set of observations contains only one gross error, the outlying observation is likely to be detected, but this can not be guaranteed.
In addition, program gama-local computes a posteriori estimate
of reference standard deviation separately for horizontal distances
and directions and/or angles after formula from
m0'_t = sqrt(sum{~v^2_it}) / sum{~q_vi}), t=d,s,
|
where symbol t denotes observed distances, directions and/or angles.
m0 apriori : 10.00 m0' empirical: 9.64 [pvv] : 3.43560e+03 During statistical analysis we work - with empirical standard deviation 9.64 - with confidence level 95 % Ratio m0' empirical / m0 apriori: 0.964 95 % interval (0.773, 1.227) contains value m0'/m0 m0'/m0 (distances): 0.997 m0'/m0 (directions): 0.943 Maximal decrease of m0''/m0 on elimination of one observation: 0.892 Maximal studentized residual 2.48 exceeds critical value 1.95 on significance level 5 % for observation #35 <distance from="407" to="422" val="346.415" stdev="5.0" /> |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Program gama-local lists separately review of coordinates of fixed and
adjusted points; adjusted constrained coordinates are marked with
*; see equation (3). Adjusted coordinate standard deviations
m_x and m_y, and values for computing confidence intervals
are given in the listing of adjusted coordinates (Parameters of statistical analysis). In the review index i is the index of unknown
x_i from the system of project equations (1) corresponding to the
point coordinates x and y.
Fixed points
************
point x y
========================================
1 1054980.484 644498.590
2 1054933.801 643654.101
Adjusted coordinates
********************
i point approximate correction adjusted std.dev conf.i.
====================== value ====== [m] ====== value ========== [mm] ===
422
2 x 1055167.22747 -0.00510 1055167.22237 2.7 5.4
3 y 644041.46119 0.00023 644041.46142 2.5 5.1
424
4 X * 1055205.41198 -0.00056 1055205.41142 3.1 6.3
5 Y * 644318.24425 -0.00125 644318.24300 3.6 7.2
|
For adjusted points, program summarizes information on standard ellipses, confidence ellipses, mean square positional errors (m_p), mean coordinate errors (m_xy) and coefficients g characterizing position of approximate coordinates with regard to the confidence ellipse.
Mean errors and parameters of error ellipses
********************************************
point mp mxy mean error ellipse conf.err. ellipse g
========== [mm] == [mm] ==== a [mm] b alpha[g] ==== a' [mm] b' ========
422 3.6 2.6 2.7 2.5 187.0 6.8 6.4 0.8
424 4.7 3.4 3.7 2.9 131.8 9.5 7.4 0.2
403 5.7 4.0 4.3 3.6 78.9 11.0 9.3 1.1
|
Mean square positional error m_p and mean coordinate error (m_xy) are computed as
m_p = sqrt(m_y^2 + m_x^2), m_xy = m_p / sqrt(2), |
where m_y^2 and m_x^2 are squares of standard deviations (variances) of adjusted points coordinates.
Semimajor and semiminor axes of standard ellipse are denoted as a and b in the listing, bearing of semimajor axis is denoted as alpha and they are computed from covariances of adjusted coordinates
a = sqrt(1/2(cov_yy + cov_xx + c),
b = sqrt(1/2(cov_yy + cov_xx - c),
c = sqrt( (cov_xx - cov_yy)^2 + 4(cov_xy)^2 ),
tan 2alpha = 2(cov_xy) / (cov_xx - cov_yy).
|
The angle alpha (the bearing of semimajor axis) is measured clockwise from X axis.
Probability that standard ellipse covers real position of a point is
relatively low. For this reason program gama-local computes extra
confidence ellipse for which the probability of covering real
point position is equal to the given confidence probability. Both
ellipses are located in the same center, they share the same bearing of
semimajor axes and they are similar. For lengths of their semi-axis
holds
a' = k_p a, b' = k_p b, |
where k_p is a coefficient computed for the given probability P as defined in Parameters of statistical analysis.
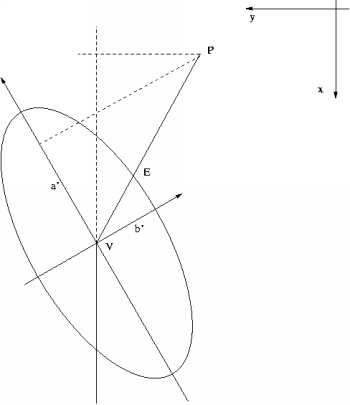
Position of approximate coordinates of an adjusted point with respect to its confidence ellipse are expressed by a coeeficient g Three cases are possible
The coefficient g is calculated from formula
g = sqrt( (a_0 / a')^2 + (b_0/b')^2 ) |
where
b_0 = delta_y cos(alpha) - delta_x sin(alpha),
a_0 = delta_y sin(alpha) - delta_x cos(alpha)
|
symbol delta is used for correction of approximate coordinates and alpha is bearing of confidence ellipse semimajor axis.
If network contains sets of observed directions, program writes information on corresponding adjusted orientations, standard deviations and confidence intervals. Index i is the same as in the case of adjusted coordinates the index of i-th adjusted unknown in the project equations.
Adjusted bearings ***************** i standpoint approximate correction adjusted std.dev conf.i. ==================== value [g] ==== [g] === value [g] ======= [cc] === 1 1 296.484371 -0.000917 296.483454 5.1 10.3 10 2 96.484371 0.000708 96.485079 5.1 10.4 21 403 20.850571 -0.001953 20.848618 8.8 17.7 |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
In the review of adjusted observations program gama-local prints index of
the observation, index of the row in matrix A in the system (1),
identifications of standpoint and target point, type of the observation,
its approximate and adjusted value, standard deviation and confidence
interval.
Adjusted observations ********************* i standpoint target observed adjusted std.dev conf.i. ===================================== value ==== [m|g] ====== [mm|cc] == 1 1 2 dis. 845.77700 845.77907 3.0 6.1 2 422 dir. 28.205700 28.205613 5.1 10.3 3 424 dir. 60.490600 60.491359 6.7 13.6 |
Review of residuals serves for analysis of observations and containts
values of normalized or studentized residuals (depending on type of
m0_a used) and three characteristics.
Theese are coefficient f identifying weak network elements and
estimates of real error of observation e-obs and real error of
its adjusted value e-adj, see definition in the following text.
If normalized or studentized residual exceeds critical value for the
given confidence probability, it is marked in the review with symbol
c (critical) and maximal normalized or studentized residual is
marked with symbol m.
Residuals and analysis of observations ************************************** i standpoint target f[%] v |v'| e-obs. e-adj. ======================================== [mm|cc] =========== [mm|cc] === 1 1 2 dir. 47.4 9.170 1.1 12.7 3.5 2 422 dir. 47.0 -0.873 0.1 -1.2 -0.3 3 424 dir. 30.3 7.588 1.1 14.8 7.2 |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
When planning observations in a geodetic network we always try to guarantee that all observed elements are checked by other measurements. Only with redundant measurements it is possible to adjust observations and possibly remove blunders that might otherwise totaly corrupt the whole set of measurements. Apart from sufficient number of redundant observations the degree of control of single observed elements is given by the network configuration, ie. its geometry.
Less controlled observations represent weak network elements and they can in extreme cases even disable detection of gross observational errors as it is in the case of uncontrolled observations. There are two limit cases of observation control
Weakly controlled or uncontrolled observations can result even from elimination of certain suspisios observations during analysis of adjusment.
Standard deviation of adjusted observations is less than standard deviation of the measurement. Degree of observation control in network is defined as coefficient
(8) f = 100 (m_l - m_L)/m_l, |
where m_l is standard deviation of observed quantity and m_L is standard deviation computed from a posteriori reference standard deviation m0. We consider observed network element to be
u),
w).
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Acording to previous section we can consider an observation to be controlled if its coefficient f > 0.1. Any controlled observation can be eliminated from the network without corrupting the network consistency—network reduced by one controlled observation can be adjusted and all unknown parameters can be compute without the eliminated observation.
Estimate of real error of i-th observation is defined as
(9) e_li = L^red_i - l_i, |
where e_li is value of i-th observation and is value of i-th network element computed from adjusted coordinates and/or orientations of the reduced network. Similarly is defined the estimate of real error of a residual
(10) e_vi = L^red_i - L_l. |
Adjustment results are the best statistical estimate of unknown parameters that we have. This holds true even for adjustment of reduced network which is not influenced by real error of i-th observation. On favourable occasions differences (9) and (10) can help to detect blunders but to interpret these estimates as real errors is possible only with substantial exaggeration. These estimates fail when there are more than one significant observational error. Generally holds tha the weaker the element is controlled in netowrk the less reliable these estimates are.
Estimate of real error of an observation computes program gama-local as
e_li = v_i/(p_i q_vi) |
and estimate of real error of a residual as
e_vi = e_li - v_i. |
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Mathematical model of geodetic network adjustment in gama-local
is defined as a set of known real-valued differentiable functions
(11) L^* = f(X^*) |
where
L^*
is a vector of theoretical correct observations and
X^*
is a vector of correct values of parameters. For the given sample set
of observations L and the unknown vector of residuals v we
can express the estimate of parameters X as a nonlinear set of
equations
(12) L + v = f(X). |
With approximate values X_0 of unknown parameters
(12) X = X_0 + x |
we can linearize the equations (12)
L + v = f(X_0) + f'(X_0)x. |
yielding the linear set of equations (1)
Unknown parameters in gama-local mathematical model are points
coordinates and orientation angles (transforming observed directions
to bearings). The observables described by functions (12) belong into
two classes
Internally in gama-local unknown corrections to linear
observables are computed in millimeters and corrections to angular
observables in centigrade seconds. To reflect the internal units in
used all partial derivatives of angular observables by coordinates are
scaled by factor
2000/pi.
When computing coefficients of project equations (1) we expect that approximate coordinates of points are known with sufficient accuracy needed for linearization of generally nonlinear relations between observations and unknown paramters. Most often this is true but not always and generally we have to check how close our approximation is to adjusted parameters.
Generally we check linearization in adjustment by double calculation of residuals
v^I = Ax - b,
v^II = ~l(~x) - l,
|
Program gama-local similarly computes and tests differences in
values of adjusted observations once computed from residuals
and once from adjusted coordinates. For measured directions
and angles gama-local computes in addition transverse deviation
corresponding to computed angle difference in the distance
of target point (or the farther of two targets for angle).
As a criterion of bad linearization is supposed positional
deviation greater or equal to 0.0005 millimetres.
Test of linearization error *************************** Diffs in adj. obs from residuals and from adjusted coordinates ************************************************************** i standpoint target observed r difference ================================= value = [mm|cc] = [cc] == [mm]= 2 3022184030 3022724008 dist. 28.39200 -7.070 -0.003 3 3022724002 dist. 72.30700 -18.815 -0.001 7 3000001063 dir. 286.305200 11.272 -0.002 -0.001 8 3022724008 dir. 357.800600 -23.947 0.037 0.002 |
From the practical point of view it might seem that the tolerance
0.0005 mm for detecting poor linearization is too strict. Its
exceeding in program gama-local results in repeated adjustment
with substitute adjusted coordinates for approximate. Given tolerance
was chosen so strict to guarantee that listed output results would
never be influenced by linearization and could serve for verification
and testing of numerical solutions produced by other programs.
Iterated adjustement with successive improvement of approximate unknown coordinates converges usually even for gross errors in initial estimates of unknown coordinates. If the influence of linearization is detected after adjustment, typically only one iteration is sufficient for recovering.
For any automatically controlled iteration we have to set up certain
stopping criterion independent on the convergence and results obtained.
Program gama-local computes iterated adjustment three times at maximum.
If the bad linearization is detected even after three readjustments it
signals that given network configuration is somehow suspicious.
| [ < ] | [ > ] | [ << ] | [ Up ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Symbols and names used in adjustment statistics.
| Symbol | Description |
|---|---|
| v, V | residual, vector of residuals |
| p, P | observation weight, matrix of weights |
| [pvv] | sum of weighted residuals v’Pv.
The summation symbol [.] used to be popular in geodetic literiture, namely in connection with description of normal equations, during pre-computer era. It was introduced by Carl Friedrich Gauss who also introduce symbol P for weights (Latin pondus means weight). Letter V for adjustment reductions comes from German Verbesserung. We use [pvv] symbol only in html and text adjustment output. Sic transit gloria mundi. |
| Ax = b, P | design matrix, right-hand side (rhs) and weight matrix P |
| r | redundancy, typically number of columns minus rows of A |
| Nx = n | normal equations,
N = A’PA,
n = A’Pb.
The method of least squares can be solved directly from Ax=b. which is generally a more numerically stable solution |
| Q = inv(N) | cofactor matrix for adjusted unknowns (matrix of weight coefficients, cofactors, of adjusted unknowns) |
| Q_L = AQA’ | cofactor matrix for adjusted observations |
| f[%] | degree of control of an observation in the network, spans from 0% (uncontrolled, e.g. observed direction and distance to an isolated adjustment point) to 100% (fully controled, e.g. measured distance between two fixed points) |
| m0 | a priori reference standard deviation. |
| m0’ | a posteriori estimate of reference standard deviation |
| m0” | minimal a posteriori estimate of reference standard deviation after removal one observation (removal of the observation leading to minimal value of m0”) |
| g | position of approximate coordinates xy of the adjusted point with
respect to its confidence ellipse (g < 1 approximate coordinates
are located inside the ellipse; g = 1 on the ellipse; g > 1
outside the ellipse). Zero value of g indicates that approximate and adjusted coordinates are identical. This situation typically happens when iterative adjustement is needed due to poor initial linearization (initial approximate coordinates are too far from the adjusted) and the iterative process ends up with identical approximate and adjusted coordinates. |
| [ << ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
This document was generated on February 17, 2024 using texi2html 1.82.