Linear Algebra¶
This chapter describes functions for solving linear systems. The
library provides linear algebra operations which operate directly on
the gsl_vector and gsl_matrix objects. These routines
use the standard algorithms from Golub & Van Loan’s Matrix
Computations with Level-1 and Level-2 BLAS calls for efficiency.
The functions described in this chapter are declared in the header file
gsl_linalg.h.
LU Decomposition¶
A general  -by-
-by- matrix
matrix  has an
has an  decomposition
decomposition

where  is an -by- permutation matrix,
is an -by- permutation matrix,  is
-by-
is
-by- and
and  is -by-.
For square matrices, is a lower unit triangular matrix and
is upper triangular. For
is -by-.
For square matrices, is a lower unit triangular matrix and
is upper triangular. For  , is a unit lower
trapezoidal matrix of size -by-. For
, is a unit lower
trapezoidal matrix of size -by-. For  ,
is upper trapezoidal of size -by-.
For square matrices this decomposition can be used to convert the linear system
,
is upper trapezoidal of size -by-.
For square matrices this decomposition can be used to convert the linear system
 into a pair of triangular systems (
into a pair of triangular systems ( ,
,
 ), which can be solved by forward and back-substitution.
Note that the decomposition is valid for singular matrices.
), which can be solved by forward and back-substitution.
Note that the decomposition is valid for singular matrices.
-
int gsl_linalg_LU_decomp(gsl_matrix *A, gsl_permutation *p, int *signum)¶
-
int gsl_linalg_complex_LU_decomp(gsl_matrix_complex *A, gsl_permutation *p, int *signum)¶
These functions factorize the matrix
Ainto the
decomposition  . On output the diagonal and upper
triangular (or trapezoidal) part of the input matrix
. On output the diagonal and upper
triangular (or trapezoidal) part of the input matrix Acontain the matrix. The lower triangular (or trapezoidal) part of the input matrix (excluding the
diagonal) contains . The diagonal elements of are
unity, and are not stored.The permutation matrix
is encoded in the permutation
pon output. The -th column of the matrix
is given by the
-th column of the matrix
is given by the  -th column of the identity matrix, where
-th column of the identity matrix, where
 the
-th element of the permutation vector. The sign of the
permutation is given by
the
-th element of the permutation vector. The sign of the
permutation is given by signum. It has the value ,
where
,
where  is the number of interchanges in the permutation.
is the number of interchanges in the permutation.The algorithm used in the decomposition is Gaussian Elimination with partial pivoting (Golub & Van Loan, Matrix Computations, Algorithm 3.4.1), combined with a recursive algorithm based on Level 3 BLAS (Peise and Bientinesi, 2016).
The functions return
GSL_SUCCESSfor non-singular matrices. If the matrix is singular, the factorization is still completed, and the functions return an integer![k \in [1, MIN(M,N)]](_images/math/809a229b5eb72981d10da825eaafbabbacff51c8.png) such that
such that
 . In this case, is singular and the
decomposition should not be used to solve linear systems.
. In this case, is singular and the
decomposition should not be used to solve linear systems.
-
int gsl_linalg_LU_solve(const gsl_matrix *LU, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x)¶
-
int gsl_linalg_complex_LU_solve(const gsl_matrix_complex *LU, const gsl_permutation *p, const gsl_vector_complex *b, gsl_vector_complex *x)¶
These functions solve the square system
using the
decomposition of into (LU,p) given bygsl_linalg_LU_decomp()orgsl_linalg_complex_LU_decomp()as input.
-
int gsl_linalg_LU_svx(const gsl_matrix *LU, const gsl_permutation *p, gsl_vector *x)¶
-
int gsl_linalg_complex_LU_svx(const gsl_matrix_complex *LU, const gsl_permutation *p, gsl_vector_complex *x)¶
These functions solve the square system
in-place using the
precomputed decomposition of into (LU,p). On inputxshould contain the right-hand side , which is replaced
by the solution on output.
, which is replaced
by the solution on output.
-
int gsl_linalg_LU_refine(const gsl_matrix *A, const gsl_matrix *LU, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x, gsl_vector *work)¶
-
int gsl_linalg_complex_LU_refine(const gsl_matrix_complex *A, const gsl_matrix_complex *LU, const gsl_permutation *p, const gsl_vector_complex *b, gsl_vector_complex *x, gsl_vector_complex *work)¶
These functions apply an iterative improvement to
x, the solution of, from the precomputed decomposition of into
(LU,p). Additional workspace of lengthNis required inwork.
-
int gsl_linalg_LU_invert(const gsl_matrix *LU, const gsl_permutation *p, gsl_matrix *inverse)¶
-
int gsl_linalg_complex_LU_invert(const gsl_matrix_complex *LU, const gsl_permutation *p, gsl_matrix_complex *inverse)¶
These functions compute the inverse of a matrix
from its
decomposition (LU,p), storing the result in the matrixinverse. The inverse is computed by computing the inverses ,
,  and finally forming the product
and finally forming the product
 . Each step is based on Level 3 BLAS calls.
. Each step is based on Level 3 BLAS calls.It is preferable to avoid direct use of the inverse whenever possible, as the linear solver functions can obtain the same result more efficiently and reliably (consult any introductory textbook on numerical linear algebra for details).
-
int gsl_linalg_LU_invx(gsl_matrix *LU, const gsl_permutation *p)¶
-
int gsl_linalg_complex_LU_invx(gsl_matrix_complex *LU, const gsl_permutation *p)¶
These functions compute the inverse of a matrix
from its
decomposition (LU,p), storing the result in-place in the matrixLU. The inverse is computed by computing the inverses, and finally forming the product
. Each step is based on Level 3 BLAS calls.It is preferable to avoid direct use of the inverse whenever possible, as the linear solver functions can obtain the same result more efficiently and reliably (consult any introductory textbook on numerical linear algebra for details).
-
double gsl_linalg_LU_det(gsl_matrix *LU, int signum)¶
-
gsl_complex gsl_linalg_complex_LU_det(gsl_matrix_complex *LU, int signum)¶
These functions compute the determinant of a matrix
from its
decomposition, LU. The determinant is computed as the product of the diagonal elements of and the sign of the row
permutation signum.
-
double gsl_linalg_LU_lndet(gsl_matrix *LU)¶
-
double gsl_linalg_complex_LU_lndet(gsl_matrix_complex *LU)¶
These functions compute the logarithm of the absolute value of the determinant of a matrix
,  , from its
decomposition,
, from its
decomposition, LU. This function may be useful if the direct computation of the determinant would overflow or underflow.
-
int gsl_linalg_LU_sgndet(gsl_matrix *LU, int signum)¶
-
gsl_complex gsl_linalg_complex_LU_sgndet(gsl_matrix_complex *LU, int signum)¶
These functions compute the sign or phase factor of the determinant of a matrix
,  , from its decomposition,
, from its decomposition,
LU.
QR Decomposition¶
A general rectangular -by- matrix has a
 decomposition into the product of a unitary
-by- square matrix
decomposition into the product of a unitary
-by- square matrix  (where
(where  ) and
an -by- right-triangular matrix
) and
an -by- right-triangular matrix  ,
,

This decomposition can be used to convert the square linear system
into the triangular system  , which can be solved by
back-substitution. Another use of the decomposition is to
compute an orthonormal basis for a set of vectors. The first
columns of form an orthonormal basis for the range of ,
, which can be solved by
back-substitution. Another use of the decomposition is to
compute an orthonormal basis for a set of vectors. The first
columns of form an orthonormal basis for the range of ,
 , when has full column rank.
, when has full column rank.
When , the bottom  rows of are zero,
and so can be naturally partioned as
rows of are zero,
and so can be naturally partioned as

where  is -by- upper triangular,
is -by- upper triangular,  is -by-, and
is -by-, and
 is -by-
is -by- .
.  is sometimes called the thin or reduced
QR decomposition. The solution of the least squares problem
is sometimes called the thin or reduced
QR decomposition. The solution of the least squares problem  when
has full rank is:
when
has full rank is:

where  is the first elements of
is the first elements of  . If is rank deficient,
see QR Decomposition with Column Pivoting and Complete Orthogonal Decomposition.
. If is rank deficient,
see QR Decomposition with Column Pivoting and Complete Orthogonal Decomposition.
GSL offers two interfaces for the decomposition. The first proceeds by zeroing
out columns below the diagonal of , one column at a time using Householder transforms.
In this method, the factor is represented as a product of Householder reflectors:

where each  for a scalar
for a scalar  and column vector
and column vector
 . In this method, functions which compute the full matrix or apply
. In this method, functions which compute the full matrix or apply
 to a right hand side vector operate by applying the Householder matrices one
at a time using Level 2 BLAS.
to a right hand side vector operate by applying the Householder matrices one
at a time using Level 2 BLAS.
The second interface is based on a Level 3 BLAS block recursive algorithm developed by
Elmroth and Gustavson. In this case, is written in block form as

where  is an -by- matrix of the column vectors
and
is an -by- matrix of the column vectors
and  is an -by- upper triangular matrix, whose diagonal elements
are the . Computing the full , while requiring more flops than
the Level 2 approach, offers the advantage that all standard operations can take advantage
of cache efficient Level 3 BLAS operations, and so this method often performs faster
than the Level 2 approach. The functions for the recursive block algorithm have a
is an -by- upper triangular matrix, whose diagonal elements
are the . Computing the full , while requiring more flops than
the Level 2 approach, offers the advantage that all standard operations can take advantage
of cache efficient Level 3 BLAS operations, and so this method often performs faster
than the Level 2 approach. The functions for the recursive block algorithm have a
_r suffix, and it is recommended to use this interface for performance
critical applications.
-
int gsl_linalg_QR_decomp_r(gsl_matrix *A, gsl_matrix *T)¶
-
int gsl_linalg_complex_QR_decomp_r(gsl_matrix_complex *A, gsl_matrix_complex *T)¶
These functions factor the
-by- matrix Ainto the decomposition  using the recursive Level 3 BLAS
algorithm of Elmroth and Gustavson. On output the diagonal and
upper triangular part of
using the recursive Level 3 BLAS
algorithm of Elmroth and Gustavson. On output the diagonal and
upper triangular part of Acontain the matrix. The -by-
matrix Tstores the upper triangular factor appearing in.
The matrix is given by  , where the elements
below the diagonal of
, where the elements
below the diagonal of Acontain the columns of on output.This algorithm requires
 and performs best for
“tall-skinny” matrices, i.e.
and performs best for
“tall-skinny” matrices, i.e.  .
.
-
int gsl_linalg_QR_solve_r(const gsl_matrix *QR, const gsl_matrix *T, const gsl_vector *b, gsl_vector *x)¶
-
int gsl_linalg_complex_QR_solve_r(const gsl_matrix_complex *QR, const gsl_matrix_complex *T, const gsl_vector_complex *b, gsl_vector_complex *x)¶
These functions solve the square system
using the
decomposition of held in (QR,T). The least-squares solution for rectangular systems can be found usinggsl_linalg_QR_lssolve_r()orgsl_linalg_complex_QR_lssolve_r().
-
int gsl_linalg_QR_lssolve_r(const gsl_matrix *QR, const gsl_matrix *T, const gsl_vector *b, gsl_vector *x, gsl_vector *work)¶
-
int gsl_linalg_complex_QR_lssolve_r(const gsl_matrix_complex *QR, const gsl_matrix_complex *T, const gsl_vector_complex *b, gsl_vector_complex *x, gsl_vector_complex *work)¶
These functions find the least squares solution to the overdetermined system
, where the matrix Ahas more rows than columns. The least squares solution minimizes the Euclidean norm of the residual, . The routine requires as input
the decomposition of into (
. The routine requires as input
the decomposition of into (QR,T) given bygsl_linalg_QR_decomp_r()orgsl_linalg_complex_QR_decomp_r().The parameter
xis of length.
The solution  is returned in the first rows of
is returned in the first rows of x, i.e.
x[0], x[1], ..., x[N-1]. The last rows
of xcontain a vector whose norm is equal to the residual norm . This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in
. This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in work.
-
int gsl_linalg_QR_lssolvem_r(const gsl_matrix *QR, const gsl_matrix *T, const gsl_matrix *B, gsl_matrix *X, gsl_matrix *work)¶
-
int gsl_linalg_complex_QR_lssolvem_r(const gsl_matrix_complex *QR, const gsl_matrix_complex *T, const gsl_matrix_complex *B, gsl_matrix_complex *X, gsl_matrix_complex *work)¶
These functions find the least squares solutions to the overdetermined systems
 where the matrix
where the matrix Ahas more rows than columns. The least squares solution minimizes the Euclidean norm of the residual, . The routine requires as input
the decomposition of into (
. The routine requires as input
the decomposition of into (QR,T) given bygsl_linalg_QR_decomp_r()orgsl_linalg_complex_QR_decomp_r(). The right hand side is provided in column
of the input
is provided in column
of the input B, while the solution is stored in the
first rows of column of the output
is stored in the
first rows of column of the output X.The parameters
XandBare of size-by- .
The last rows of
.
The last rows of Xcontain vectors whose norm is equal to the residual norm . This similar to the behavior of LAPACK DGELS.
Additional workspace of length -by- is required in
. This similar to the behavior of LAPACK DGELS.
Additional workspace of length -by- is required in work.
-
int gsl_linalg_QR_QTvec_r(const gsl_matrix *QR, const gsl_matrix *T, gsl_vector *v, gsl_vector *work)¶
-
int gsl_linalg_complex_QR_QHvec_r(const gsl_matrix_complex *QR, const gsl_matrix_complex *T, gsl_vector_complex *v, gsl_vector_complex *work)¶
These functions apply the matrix
 (or ) encoded in the decomposition
(
(or ) encoded in the decomposition
(QR,T) to the vectorv, storing the result (or
(or  ) in
) in v. The matrix multiplication is carried out directly using the encoding of the Householder vectors without needing to form the full matrix. Additional workspace of size is required in work.
-
int gsl_linalg_QR_QTmat_r(const gsl_matrix *QR, const gsl_matrix *T, gsl_matrix *B, gsl_matrix *work)¶
-
int gsl_linalg_complex_QR_QHmat_r(const gsl_matrix_complex *QR, const gsl_matrix_complex *T, gsl_matrix_complex *B, gsl_matrix_complex *work)¶
This function applies the matrix
(or ) encoded in the decomposition
(QR,T) to the-by- matrix
matrix B, storing the result (or
(or  ) in
) in B. The matrix multiplication is carried out directly using the encoding of the Householder vectors without needing to form the full matrix. Additional workspace of size -by- is required in work.
-
int gsl_linalg_QR_unpack_r(const gsl_matrix *QR, const gsl_matrix *T, gsl_matrix *Q, gsl_matrix *R)¶
-
int gsl_linalg_complex_QR_unpack_r(const gsl_matrix_complex *QR, const gsl_matrix_complex *T, gsl_matrix_complex *Q, gsl_matrix_complex *R)¶
These functions unpack the encoded
decomposition
(QR,T) as output fromgsl_linalg_QR_decomp_r()orgsl_linalg_complex_QR_decomp_r()into the matricesQandR, whereQis-by- and Ris-by-.
Note that the full matrix is -by-, however the lower trapezoidal portion
is zero, so only the upper triangular factor is stored.
-
int gsl_linalg_QR_rcond(const gsl_matrix *QR, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the
factor,
stored in the upper triangle of QR. The reciprocal condition number estimate, defined as , is stored in
, is stored in rcond. Additional workspace of size is required in
is required in work.
Level 2 Interface¶
The functions below are for the slower Level 2 interface to the QR decomposition. It is
recommended to use these functions only for , since the Level 3 interface
above performs much faster for .
-
int gsl_linalg_QR_decomp(gsl_matrix *A, gsl_vector *tau)¶
-
int gsl_linalg_complex_QR_decomp(gsl_matrix_complex *A, gsl_vector_complex *tau)¶
These functions factor the
-by- matrix Ainto the decomposition . On output the diagonal and
upper triangular part of the input matrix contain the matrix
. The vector tauand the columns of the lower triangular part of the matrixAcontain the Householder coefficients and Householder vectors which encode the orthogonal matrixQ. The vectortaumust be of length. The matrix
is related to these components by the product of
 reflector matrices,
reflector matrices,  where and is the
Householder vector
where and is the
Householder vector  .
This is the same storage scheme as used by LAPACK.
.
This is the same storage scheme as used by LAPACK.The algorithm used to perform the decomposition is Householder QR (Golub & Van Loan, “Matrix Computations”, Algorithm 5.2.1).
-
int gsl_linalg_QR_solve(const gsl_matrix *QR, const gsl_vector *tau, const gsl_vector *b, gsl_vector *x)¶
-
int gsl_linalg_complex_QR_solve(const gsl_matrix_complex *QR, const gsl_vector_complex *tau, const gsl_vector_complex *b, gsl_vector_complex *x)¶
These functions solve the square system
using the
decomposition of held in (QR,tau). The least-squares solution for rectangular systems can be found usinggsl_linalg_QR_lssolve().
-
int gsl_linalg_QR_svx(const gsl_matrix *QR, const gsl_vector *tau, gsl_vector *x)¶
-
int gsl_linalg_complex_QR_svx(const gsl_matrix_complex *QR, const gsl_vector_complex *tau, gsl_vector_complex *x)¶
These functions solve the square system
in-place using
the decomposition of held in (QR,tau). On inputxshould contain the right-hand side, which is replaced by the solution on output.
-
int gsl_linalg_QR_lssolve(const gsl_matrix *QR, const gsl_vector *tau, const gsl_vector *b, gsl_vector *x, gsl_vector *residual)¶
-
int gsl_linalg_complex_QR_lssolve(const gsl_matrix_complex *QR, const gsl_vector_complex *tau, const gsl_vector_complex *b, gsl_vector_complex *x, gsl_vector_complex *residual)¶
These functions find the least squares solution to the overdetermined system
where the matrix Ahas more rows than columns. The least squares solution minimizes the Euclidean norm of the residual, .The routine requires as input
the decomposition
of into (
.The routine requires as input
the decomposition
of into (QR,tau) given bygsl_linalg_QR_decomp()orgsl_linalg_complex_QR_decomp(). The solution is returned inx. The residual is computed as a by-product and stored inresidual.
-
int gsl_linalg_QR_QTvec(const gsl_matrix *QR, const gsl_vector *tau, gsl_vector *v)¶
-
int gsl_linalg_complex_QR_QHvec(const gsl_matrix_complex *QR, const gsl_vector_complex *tau, gsl_vector_complex *v)¶
These functions apply the matrix
(or ) encoded in the decomposition
(QR,tau) to the vectorv, storing the result (or ) in v. The matrix multiplication is carried out directly using the encoding of the Householder vectors without needing to form the full matrix (or ).
-
int gsl_linalg_QR_Qvec(const gsl_matrix *QR, const gsl_vector *tau, gsl_vector *v)¶
-
int gsl_linalg_complex_QR_Qvec(const gsl_matrix_complex *QR, const gsl_vector_complex *tau, gsl_vector_complex *v)¶
These functions apply the matrix
encoded in the decomposition
(QR,tau) to the vectorv, storing the result in
in v. The matrix multiplication is carried out directly using the encoding of the Householder vectors without needing to form the full matrix.
-
int gsl_linalg_QR_QTmat(const gsl_matrix *QR, const gsl_vector *tau, gsl_matrix *B)¶
This function applies the matrix
encoded in the decomposition
(QR,tau) to the-by- matrix B, storing the result in B. The matrix multiplication is carried out directly using the encoding of the Householder vectors without needing to form the full matrix.
-
int gsl_linalg_QR_Rsolve(const gsl_matrix *QR, const gsl_vector *b, gsl_vector *x)¶
This function solves the triangular system
 for
for
x. It may be useful if the product has already
been computed using
has already
been computed using gsl_linalg_QR_QTvec().
-
int gsl_linalg_QR_Rsvx(const gsl_matrix *QR, gsl_vector *x)¶
This function solves the triangular system
for xin-place. On inputxshould contain the right-hand side
and is replaced by the solution on output. This function may be useful if
the product has already been computed using
gsl_linalg_QR_QTvec().
-
int gsl_linalg_QR_unpack(const gsl_matrix *QR, const gsl_vector *tau, gsl_matrix *Q, gsl_matrix *R)¶
This function unpacks the encoded
decomposition
(QR,tau) into the matricesQandR, whereQis-by- and Ris-by-.
-
int gsl_linalg_QR_QRsolve(gsl_matrix *Q, gsl_matrix *R, const gsl_vector *b, gsl_vector *x)¶
This function solves the system
 for
for x. It can be used when the decomposition of a matrix is available in
unpacked form as (Q,R).
-
int gsl_linalg_QR_update(gsl_matrix *Q, gsl_matrix *R, gsl_vector *w, const gsl_vector *v)¶
This function performs a rank-1 update
 of the
decomposition (
of the
decomposition (Q,R). The update is given by where the output matrices and are also
orthogonal and right triangular. Note that
where the output matrices and are also
orthogonal and right triangular. Note that wis destroyed by the update.
-
int gsl_linalg_R_solve(const gsl_matrix *R, const gsl_vector *b, gsl_vector *x)¶
This function solves the triangular system
for the
-by- matrix R.
-
int gsl_linalg_R_svx(const gsl_matrix *R, gsl_vector *x)¶
This function solves the triangular system
in-place. On
input xshould contain the right-hand side, which is
replaced by the solution on output.
Triangle on Top of Rectangle¶
This section provides routines for computing the decomposition of the
specialized matrix

where is an -by- upper triangular matrix, and is
an -by- dense matrix. This type of matrix arises, for example,
in the sequential TSQR algorithm. The Elmroth and Gustavson algorithm is used to
efficiently factor this matrix. Due to the upper triangular factor, the
matrix takes the form

with

and  is dense and of the same dimensions as .
is dense and of the same dimensions as .
-
int gsl_linalg_QR_UR_decomp(gsl_matrix *U, gsl_matrix *A, gsl_matrix *T)¶
This function computes the
decomposition of the matrix  , where
is -by- upper triangular and is -by-
dense. On output, is replaced by the factor, and is replaced
by . The -by- upper triangular block reflector is
stored in
, where
is -by- upper triangular and is -by-
dense. On output, is replaced by the factor, and is replaced
by . The -by- upper triangular block reflector is
stored in Ton output.
-
int gsl_linalg_QR_UR_lssolve(const gsl_matrix *R, const gsl_matrix *Y, const gsl_matrix *T, const gsl_vector *b, gsl_vector *x, gsl_vector *work)¶
This function finds the least squares solution to the overdetermined system,

where
is a -by- upper triangular matrix, and
is a -by- dense matrix.
The routine requires as input the decomposition
of  into (
into (R,Y,T) given bygsl_linalg_QR_UR_decomp(). The parameterxis of length .
The solution is returned in the first rows of
.
The solution is returned in the first rows of x, i.e. x[0], x[1], ..., x[N-1]. The last rows
of xcontain a vector whose norm is equal to the residual norm . This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in
. This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in work.
-
int gsl_linalg_QR_UR_lssvx(const gsl_matrix *R, const gsl_matrix *Y, const gsl_matrix *T, gsl_vector *x, gsl_vector *work)¶
This function finds the least squares solution to the overdetermined system,
in-place, where
is a -by- upper triangular matrix, and
is a -by- dense matrix.
The routine requires as input the decomposition
of into (R,Y,T) given bygsl_linalg_QR_UR_decomp(). The parameterxis of length and contains the right
hand side vector on input.
The solution is returned in the first rows of x, i.e. x[0], x[1], ..., x[N-1]. The last rows
of xcontain a vector whose norm is equal to the residual norm. This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in work.
-
int gsl_linalg_QR_UR_QTvec(const gsl_matrix *Y, const gsl_matrix *T, gsl_vector *b, gsl_vector *work)¶
This function computes
 using the decomposition
(
using the decomposition
(Y,T) previously computed bygsl_linalg_QR_UR_decomp(). On input,bcontains the length vector , and on output it will contain
. Additional workspace of length is required in work.
Triangle on Top of Triangle¶
This section provides routines for computing the decomposition of the
specialized matrix

where  are -by- upper triangular matrices.
The Elmroth and Gustavson algorithm is used to efficiently factor this matrix.
The matrix takes the form
are -by- upper triangular matrices.
The Elmroth and Gustavson algorithm is used to efficiently factor this matrix.
The matrix takes the form
with
and is -by- upper triangular.
-
int gsl_linalg_QR_UU_decomp(gsl_matrix *U1, gsl_matrix *U2, gsl_matrix *T)¶
This function computes the
decomposition of the matrix  , where
are -by- upper triangular. On output,
, where
are -by- upper triangular. On output, U1is replaced by the factor, and U2is replaced by. The
-by- upper triangular block reflector is stored in Ton output.
-
int gsl_linalg_QR_UU_lssolve(const gsl_matrix *R, const gsl_matrix *Y, const gsl_matrix *T, const gsl_vector *b, gsl_vector *x, gsl_vector *work)¶
This function finds the least squares solution to the overdetermined system,
where
are -by- upper triangular matrices.
The routine requires as input the decomposition
of  into (
into (R,Y,T) given bygsl_linalg_QR_UU_decomp(). The parameterxis of length .
The solution is returned in the first rows of
.
The solution is returned in the first rows of x, i.e. x[0], x[1], ..., x[N-1]. The last rows
of xcontain a vector whose norm is equal to the residual norm . This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in
. This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in work.
-
int gsl_linalg_QR_UU_lssvx(const gsl_matrix *R, const gsl_matrix *Y, const gsl_matrix *T, gsl_vector *x, gsl_vector *work)¶
This function finds the least squares solution to the overdetermined system,
in-place, where
are -by- upper triangular matrices.
The routine requires as input the decomposition
of into (R,Y,T) given bygsl_linalg_QR_UU_decomp(). The parameterxis of length and contains the right hand
side vector on input.
The solution is returned in the first rows of x, i.e. x[0], x[1], ..., x[N-1]. The last rows
of xcontain a vector whose norm is equal to the residual norm. This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in work.
-
int gsl_linalg_QR_UU_QTvec(const gsl_matrix *Y, const gsl_matrix *T, gsl_vector *b, gsl_vector *work)¶
This function computes
using the decomposition
(Y,T) previously computed bygsl_linalg_QR_UU_decomp(). On input,bcontains the vector, and on output it will contain
. Additional workspace of length is required in work.
Triangle on Top of Trapezoidal¶
This section provides routines for computing the decomposition of the
specialized matrix
where is an -by- upper triangular matrix, and is
an -by- upper trapezoidal matrix with . has
the structure,

where  is -by- dense, and
is -by- dense, and  is
-by- upper triangular.
The Elmroth and Gustavson algorithm is used to efficiently factor this matrix.
The matrix takes the form
is
-by- upper triangular.
The Elmroth and Gustavson algorithm is used to efficiently factor this matrix.
The matrix takes the form
with
and is upper trapezoidal and of the same dimensions as .
-
int gsl_linalg_QR_UZ_decomp(gsl_matrix *U, gsl_matrix *A, gsl_matrix *T)¶
This function computes the
decomposition of the matrix , where
is -by- upper triangular and is -by-
upper trapezoidal. On output, is replaced by the factor, and
is replaced by . The -by- upper triangular block reflector is
stored in Ton output.
Triangle on Top of Diagonal¶
This section provides routines for computing the decomposition of the
specialized matrix

where is an -by- upper triangular matrix and
 is an -by- diagonal matrix. This type of matrix
arises in regularized least squares problems.
The Elmroth and Gustavson algorithm is used to efficiently factor this matrix.
The matrix takes the form
is an -by- diagonal matrix. This type of matrix
arises in regularized least squares problems.
The Elmroth and Gustavson algorithm is used to efficiently factor this matrix.
The matrix takes the form
with
and is -by- upper triangular.
-
int gsl_linalg_QR_UD_decomp(gsl_matrix *U, const gsl_vector *D, gsl_matrix *Y, gsl_matrix *T)¶
This function computes the
decomposition of the matrix  , where
is -by- upper triangular and is
-by- diagonal. On output,
, where
is -by- upper triangular and is
-by- diagonal. On output, Uis replaced by the factor and is stored in Y. The-by- upper triangular block reflector is stored in Ton output.
-
int gsl_linalg_QR_UD_lssolve(const gsl_matrix *R, const gsl_matrix *Y, const gsl_matrix *T, const gsl_vector *b, gsl_vector *x, gsl_vector *work)¶
This function finds the least squares solution to the overdetermined system,
where
is -by- upper triangular and is
-by- diagonal. The routine requires as input
the decomposition of  into (
into (R,Y,T) given bygsl_linalg_QR_UD_decomp(). The parameterxis of length.
The solution is returned in the first rows of x, i.e. x[0], x[1], ..., x[N-1]. The last rows
of xcontain a vector whose norm is equal to the residual norm . This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in
. This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in work.
-
int gsl_linalg_QR_UD_lssvx(const gsl_matrix *R, const gsl_matrix *Y, const gsl_matrix *T, gsl_vector *x, gsl_vector *work)¶
This function finds the least squares solution to the overdetermined system,
in-place, where
is -by- upper triangular and is
-by- diagonal. The routine requires as input
the decomposition of into (R,Y,T) given bygsl_linalg_QR_UD_decomp(). The parameterxis of length and contains the right hand side
vector on input.
The solution is returned in the first rows of x, i.e. x[0], x[1], ..., x[N-1]. The last rows
of xcontain a vector whose norm is equal to the residual norm. This similar to the behavior of LAPACK DGELS.
Additional workspace of length is required in work.
-
int gsl_linalg_QR_UD_QTvec(const gsl_matrix *Y, const gsl_matrix *T, gsl_vector *b, gsl_vector *work)¶
This function computes
using the decomposition
(Y,T) previously computed bygsl_linalg_QR_UD_decomp(). On input,bcontains the vector, and on output it will contain
. Additional workspace of length is required in work.
QR Decomposition with Column Pivoting¶
The decomposition of an -by- matrix
can be extended to the rank deficient case by introducing a column permutation ,

The first  columns of form an orthonormal basis
for the range of for a matrix with column rank . This
decomposition can also be used to convert the square linear system
into the triangular system
columns of form an orthonormal basis
for the range of for a matrix with column rank . This
decomposition can also be used to convert the square linear system
into the triangular system  , which can be
solved by back-substitution and permutation. We denote the
decomposition with column pivoting by
, which can be
solved by back-substitution and permutation. We denote the
decomposition with column pivoting by  since
since  .
When is rank deficient with
.
When is rank deficient with  , the matrix
can be partitioned as
, the matrix
can be partitioned as

where  is -by- and nonsingular. In this case,
a basic least squares solution for the overdetermined system
can be obtained as
is -by- and nonsingular. In this case,
a basic least squares solution for the overdetermined system
can be obtained as
where consists of the first elements of .
This basic solution is not guaranteed to be the minimum norm solution unless
 (see Complete Orthogonal Decomposition).
(see Complete Orthogonal Decomposition).
-
int gsl_linalg_QRPT_decomp(gsl_matrix *A, gsl_vector *tau, gsl_permutation *p, int *signum, gsl_vector *norm)¶
This function factorizes the
-by- matrix Ainto the decomposition . On output the
diagonal and upper triangular part of the input matrix contain the
matrix . The permutation matrix is stored in the
permutation p. The sign of the permutation is given bysignum. It has the value, where is the
number of interchanges in the permutation. The vector tauand the columns of the lower triangular part of the matrixAcontain the Householder coefficients and vectors which encode the orthogonal matrixQ. The vectortaumust be of length . The
matrix is related to these components by,
. The
matrix is related to these components by,  where
where  and is the
Householder vector
and is the
Householder vector
This is the same storage scheme as used by LAPACK. The vector
normis a workspace of lengthNused for column pivoting.The algorithm used to perform the decomposition is Householder QR with column pivoting (Golub & Van Loan, “Matrix Computations”, Algorithm 5.4.1).
-
int gsl_linalg_QRPT_decomp2(const gsl_matrix *A, gsl_matrix *q, gsl_matrix *r, gsl_vector *tau, gsl_permutation *p, int *signum, gsl_vector *norm)¶
This function factorizes the matrix
Ainto the decomposition without modifying Aitself and storing the output in the separate matricesqandr.
-
int gsl_linalg_QRPT_solve(const gsl_matrix *QR, const gsl_vector *tau, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x)¶
This function solves the square system
using the
decomposition of held in (QR,tau,p) which must have been computed previously bygsl_linalg_QRPT_decomp().
-
int gsl_linalg_QRPT_svx(const gsl_matrix *QR, const gsl_vector *tau, const gsl_permutation *p, gsl_vector *x)¶
This function solves the square system
in-place using the
decomposition of held in
(QR,tau,p). On inputxshould contain the right-hand side, which is replaced by the solution on output.
-
int gsl_linalg_QRPT_lssolve(const gsl_matrix *QR, const gsl_vector *tau, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x, gsl_vector *residual)¶
This function finds the least squares solution to the overdetermined system
where the matrix Ahas more rows than columns and is assumed to have full rank. The least squares solution minimizes the Euclidean norm of the residual, . The routine requires as input
the decomposition of into (
. The routine requires as input
the decomposition of into (QR,tau,p) given bygsl_linalg_QRPT_decomp(). The solution is returned inx. The residual is computed as a by-product and stored inresidual. For rank deficient matrices,gsl_linalg_QRPT_lssolve2()should be used instead.
-
int gsl_linalg_QRPT_lssolve2(const gsl_matrix *QR, const gsl_vector *tau, const gsl_permutation *p, const gsl_vector *b, const size_t rank, gsl_vector *x, gsl_vector *residual)¶
This function finds the least squares solution to the overdetermined system
where the matrix Ahas more rows than columns and has rank given by the inputrank. If the user does not know the rank of, the routine gsl_linalg_QRPT_rank()can be called to estimate it. The least squares solution is the so-called “basic” solution discussed above and may not be the minimum norm solution. The routine requires as input the decomposition of into (QR,tau,p) given bygsl_linalg_QRPT_decomp(). The solution is returned inx. The residual is computed as a by-product and stored inresidual.
-
int gsl_linalg_QRPT_QRsolve(const gsl_matrix *Q, const gsl_matrix *R, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x)¶
This function solves the square system
 for
for
x. It can be used when the decomposition of a matrix is
available in unpacked form as (Q,R).
-
int gsl_linalg_QRPT_update(gsl_matrix *Q, gsl_matrix *R, const gsl_permutation *p, gsl_vector *w, const gsl_vector *v)¶
This function performs a rank-1 update
of the
decomposition (Q,R,p). The update is given by where the output matrices
where the output matrices  and
and
 are also orthogonal and right triangular. Note that
are also orthogonal and right triangular. Note that wis destroyed by the update. The permutationpis not changed.
-
int gsl_linalg_QRPT_Rsolve(const gsl_matrix *QR, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x)¶
This function solves the triangular system
 for the
-by- matrix contained in
for the
-by- matrix contained in QR.
-
int gsl_linalg_QRPT_Rsvx(const gsl_matrix *QR, const gsl_permutation *p, gsl_vector *x)¶
This function solves the triangular system
in-place
for the -by- matrix contained in QR. On inputxshould contain the right-hand side, which is
replaced by the solution on output.
-
size_t gsl_linalg_QRPT_rank(const gsl_matrix *QR, const double tol)¶
This function estimates the rank of the triangular matrix
contained in QR. The algorithm simply counts the number of diagonal elements of whose absolute value
is greater than the specified tolerance tol. If the inputtolis negative, a default value of is used.
is used.
-
int gsl_linalg_QRPT_rcond(const gsl_matrix *QR, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the
factor,
stored in the upper triangle of QR. The reciprocal condition number estimate, defined as, is stored in rcond. Additional workspace of size is required in work.
LQ Decomposition¶
A general rectangular -by- matrix has a
 decomposition into the product of a lower trapezoidal
-by- matrix and an orthogonal
-by- square matrix :
decomposition into the product of a lower trapezoidal
-by- matrix and an orthogonal
-by- square matrix :

If  , then can be written as
, then can be written as  where
where
 is -by- lower triangular,
and
is -by- lower triangular,
and
where consists of the first rows of , and
contains the remaining  rows. The factorization of
is essentially the same as the QR factorization of
rows. The factorization of
is essentially the same as the QR factorization of  .
.
The factorization may be used to find the minimum norm solution of
an underdetermined system of equations , where is
-by- and . The solution is
-
int gsl_linalg_LQ_decomp(gsl_matrix *A, gsl_vector *tau)¶
This function factorizes the
-by- matrix Ainto the decomposition  . On output the diagonal and
lower trapezoidal part of the input matrix contain the matrix
. The vector
. On output the diagonal and
lower trapezoidal part of the input matrix contain the matrix
. The vector tauand the elements above the diagonal of the matrixAcontain the Householder coefficients and Householder vectors which encode the orthogonal matrixQ. The vectortaumust be of length. The matrix
is related to these components by,
where and is the
Householder vector  .
This is the same storage scheme as used by LAPACK.
.
This is the same storage scheme as used by LAPACK.
-
int gsl_linalg_LQ_lssolve(const gsl_matrix *LQ, const gsl_vector *tau, const gsl_vector *b, gsl_vector *x, gsl_vector *residual)¶
This function finds the minimum norm least squares solution to the underdetermined system
,
where the -by- matrix Ahas.
The routine requires as input the decomposition of into (LQ,tau) given bygsl_linalg_LQ_decomp(). The solution is returned inx. The residual, , is computed as a by-product and stored in
, is computed as a by-product and stored in residual.
-
int gsl_linalg_LQ_unpack(const gsl_matrix *LQ, const gsl_vector *tau, gsl_matrix *Q, gsl_matrix *L)¶
This function unpacks the encoded
decomposition
(LQ,tau) into the matricesQandL, whereQis-by- and Lis-by-.
-
int gsl_linalg_LQ_QTvec(const gsl_matrix *LQ, const gsl_vector *tau, gsl_vector *v)¶
This function applies
to the vector v, storing the result in
von output.
QL Decomposition¶
A general rectangular -by- matrix has a
 decomposition into the product of an orthogonal
-by- square matrix (where
decomposition into the product of an orthogonal
-by- square matrix (where  ) and
an -by- left-triangular matrix .
) and
an -by- left-triangular matrix .
When , the decomposition is given by

where is -by- lower triangular. When
, the decomposition is given by

where is a dense -by- matrix and
matrix and
 is a lower triangular -by- matrix.
is a lower triangular -by- matrix.
-
int gsl_linalg_QL_decomp(gsl_matrix *A, gsl_vector *tau)¶
This function factorizes the
-by- matrix Ainto the decomposition  .
The vector
.
The vector taumust be of length and contains the Householder
coefficients on output.
The matrix is stored in packed form in Aon output, using the same storage scheme as LAPACK.
-
int gsl_linalg_QL_unpack(const gsl_matrix *QL, const gsl_vector *tau, gsl_matrix *Q, gsl_matrix *L)¶
This function unpacks the encoded
decomposition
(QL,tau) into the matricesQandL, whereQis-by- and Lis-by-.
Complete Orthogonal Decomposition¶
The complete orthogonal decomposition of a -by- matrix
is a generalization of the QR decomposition with column pivoting, given by
where is a -by- permutation matrix,
is -by- orthogonal, is
-by- upper triangular, with ,
and  is -by- orthogonal. If
has full rank, then
is -by- orthogonal. If
has full rank, then  ,
,  and this reduces to the
QR decomposition with column pivoting.
and this reduces to the
QR decomposition with column pivoting.
For a rank deficient least squares problem,  , the solution vector
is not unique. However if we further require that
, the solution vector
is not unique. However if we further require that  is minimized,
then the complete orthogonal decomposition gives us the ability to compute
the unique minimum norm solution, which is given by
is minimized,
then the complete orthogonal decomposition gives us the ability to compute
the unique minimum norm solution, which is given by
and the vector is the first elements of .
The COD also enables a straightforward solution of regularized least squares problems in Tikhonov standard form, written as

where  is a regularization parameter which represents a tradeoff between
minimizing the residual norm and the solution norm
is a regularization parameter which represents a tradeoff between
minimizing the residual norm and the solution norm  . For this system,
the solution is given by
. For this system,
the solution is given by
where  is a vector of length which is found by solving
is a vector of length which is found by solving
and is defined above. The equation above can be solved efficiently for different
values of  using QR factorizations of the left hand side matrix.
using QR factorizations of the left hand side matrix.
-
int gsl_linalg_COD_decomp(gsl_matrix *A, gsl_vector *tau_Q, gsl_vector *tau_Z, gsl_permutation *p, size_t *rank, gsl_vector *work)¶
-
int gsl_linalg_COD_decomp_e(gsl_matrix *A, gsl_vector *tau_Q, gsl_vector *tau_Z, gsl_permutation *p, double tol, size_t *rank, gsl_vector *work)¶
These functions factor the
-by- matrix Ainto the decomposition . The rank of
. The rank of Ais computed as the number of diagonal elements of greater than the tolerance toland output inrank. Iftolis not specified, a default value is used (seegsl_linalg_QRPT_rank()). On output, the permutation matrix is stored in p. The matrix is stored in the upper rank-by-rankblock ofA. The matrices and are encoded in packed storage in Aon output. The vectorstau_Qandtau_Zcontain the Householder scalars corresponding to the matrices and respectively and must be
of length  . The vector
. The vector workis additional workspace of length.
-
int gsl_linalg_COD_lssolve(const gsl_matrix *QRZT, const gsl_vector *tau_Q, const gsl_vector *tau_Z, const gsl_permutation *p, const size_t rank, const gsl_vector *b, gsl_vector *x, gsl_vector *residual)¶
This function finds the unique minimum norm least squares solution to the overdetermined system
where the matrix Ahas more rows than columns. The least squares solution minimizes the Euclidean norm of the residual, as well as the norm of the solution . The routine requires as input
the  decomposition of into (
decomposition of into (QRZT,tau_Q,tau_Z,p,rank) given bygsl_linalg_COD_decomp(). The solution is returned inx. The residual,, is computed as a by-product and stored in residual.
-
int gsl_linalg_COD_lssolve2(const double lambda, const gsl_matrix *QRZT, const gsl_vector *tau_Q, const gsl_vector *tau_Z, const gsl_permutation *p, const size_t rank, const gsl_vector *b, gsl_vector *x, gsl_vector *residual, gsl_matrix *S, gsl_vector *work)¶
This function finds the solution to the regularized least squares problem in Tikhonov standard form,
 . The routine requires as input
the decomposition of into (
. The routine requires as input
the decomposition of into (QRZT,tau_Q,tau_Z,p,rank) given bygsl_linalg_COD_decomp(). The parameter is supplied in lambda. The solution is returned inx. The residual,, is stored in residualon output.Sis additional workspace of sizerank-by-rank.workis additional workspace of lengthrank.
-
int gsl_linalg_COD_unpack(const gsl_matrix *QRZT, const gsl_vector *tau_Q, const gsl_vector *tau_Z, const size_t rank, gsl_matrix *Q, gsl_matrix *R, gsl_matrix *Z)¶
This function unpacks the encoded
decomposition
(QRZT,tau_Q,tau_Z,rank) into the matricesQ,R, andZ, whereQis-by-,
Ris-by-, and Zis-by-.
-
int gsl_linalg_COD_matZ(const gsl_matrix *QRZT, const gsl_vector *tau_Z, const size_t rank, gsl_matrix *A, gsl_vector *work)¶
This function multiplies the input matrix
Aon the right byZ, using the encoded decomposition
(
using the encoded decomposition
(QRZT,tau_Z,rank).Amust have columns but may
have any number of rows. Additional workspace of length is provided
in work.
Singular Value Decomposition¶
A general rectangular -by- matrix has a
singular value decomposition (SVD) into the product of an
-by- orthogonal matrix , an -by-
diagonal matrix of singular values  and the transpose of an
-by- orthogonal square matrix ,
and the transpose of an
-by- orthogonal square matrix ,

The singular values  are all non-negative and are
generally chosen to form a non-increasing sequence
are all non-negative and are
generally chosen to form a non-increasing sequence

The singular value decomposition of a matrix has many practical uses. The condition number of the matrix is given by the ratio of the largest singular value to the smallest singular value. The presence of a zero singular value indicates that the matrix is singular. The number of non-zero singular values indicates the rank of the matrix. In practice singular value decomposition of a rank-deficient matrix will not produce exact zeroes for singular values, due to finite numerical precision. Small singular values should be edited by choosing a suitable tolerance.
For a rank-deficient matrix, the null space of is given by
the columns of corresponding to the zero singular values.
Similarly, the range of is given by columns of
corresponding to the non-zero singular values.
Note that the routines here compute the “thin” version of the SVD
with as -by- orthogonal matrix. This allows
in-place computation and is the most commonly-used form in practice.
Mathematically, the “full” SVD is defined with as an
-by- orthogonal matrix and as an
-by- diagonal matrix (with additional rows of zeros).
-
int gsl_linalg_SV_decomp(gsl_matrix *A, gsl_matrix *V, gsl_vector *S, gsl_vector *work)¶
This function factorizes the
-by- matrix Ainto the singular value decomposition for .
On output the matrix
for .
On output the matrix Ais replaced by. The diagonal elements of the singular value matrix
are stored in the vector S. The singular values are non-negative and form a non-increasing sequence from to
to  . The
matrix
. The
matrix Vcontains the elements of in untransposed
form. To form the product  it is necessary to take the
transpose of
it is necessary to take the
transpose of V. A workspace of lengthNis required inwork.This routine uses the Golub-Reinsch SVD algorithm.
-
int gsl_linalg_SV_decomp_mod(gsl_matrix *A, gsl_matrix *X, gsl_matrix *V, gsl_vector *S, gsl_vector *work)¶
This function computes the SVD using the modified Golub-Reinsch algorithm, which is faster for
.
It requires the vector workof lengthNand the-by- matrix Xas additional working space.
-
int gsl_linalg_SV_decomp_jacobi(gsl_matrix *A, gsl_matrix *V, gsl_vector *S)¶
This function computes the SVD of the
-by- matrix Ausing one-sided Jacobi orthogonalization for.
The Jacobi method can compute singular values to higher
relative accuracy than Golub-Reinsch algorithms (see references for
details).
-
int gsl_linalg_SV_solve(const gsl_matrix *U, const gsl_matrix *V, const gsl_vector *S, const gsl_vector *b, gsl_vector *x)¶
This function solves the system
using the singular value
decomposition (U,S,V) of which must
have been computed previously with gsl_linalg_SV_decomp().Only non-zero singular values are used in computing the solution. The parts of the solution corresponding to singular values of zero are ignored. Other singular values can be edited out by setting them to zero before calling this function.
In the over-determined case where
Ahas more rows than columns the system is solved in the least squares sense, returning the solutionxwhich minimizes .
.
-
int gsl_linalg_SV_solve2(const double tol, const gsl_matrix *U, const gsl_matrix *V, const gsl_vector *S, const gsl_vector *b, gsl_vector *x, gsl_vector *work)¶
This function solves the system
using the singular value
decomposition (U,S,V) of which must
have been computed previously with gsl_linalg_SV_decomp().Singular values which satisfy,
 are excluded
from the solution. Additional workspace of length must be provided in
are excluded
from the solution. Additional workspace of length must be provided in
work.In the over-determined case where
Ahas more rows than columns the system is solved in the least squares sense, returning the solutionxwhich minimizes .
.
-
int gsl_linalg_SV_lssolve(const double lambda, const gsl_matrix *U, const gsl_matrix *V, const gsl_vector *S, const gsl_vector *b, gsl_vector *x, double *rnorm, gsl_vector *work)¶
This function solves the regularized least squares problem,

using the singular value decomposition (
U,S,V) of which must have been computed previously with gsl_linalg_SV_decomp(). The residual norm is stored in rnormon output. Additional workspace of size is required in
is required in work.
-
int gsl_linalg_SV_leverage(const gsl_matrix *U, gsl_vector *h)¶
This function computes the statistical leverage values
 of a matrix
using its singular value decomposition (
of a matrix
using its singular value decomposition (U,S,V) previously computed withgsl_linalg_SV_decomp(). are the diagonal values of the matrix
 and depend only on the matrix
and depend only on the matrix Uwhich is the input to this function.
Cholesky Decomposition¶
A symmetric, positive definite square matrix has a Cholesky
decomposition into a product of a lower triangular matrix and
its transpose  ,
,

This is sometimes referred to as taking the square-root of a matrix. The
Cholesky decomposition can only be carried out when all the eigenvalues
of the matrix are positive. This decomposition can be used to convert
the linear system into a pair of triangular systems
( ,
,  ), which can be solved by forward and
back-substitution.
), which can be solved by forward and
back-substitution.
If the matrix is near singular, it is sometimes possible to reduce
the condition number and recover a more accurate solution vector
by scaling as

where is a diagonal matrix whose elements are given by
 . This scaling is also known as
Jacobi preconditioning. There are routines below to solve
both the scaled and unscaled systems.
. This scaling is also known as
Jacobi preconditioning. There are routines below to solve
both the scaled and unscaled systems.
-
int gsl_linalg_cholesky_decomp1(gsl_matrix *A)¶
-
int gsl_linalg_complex_cholesky_decomp(gsl_matrix_complex *A)¶
These functions factorize the symmetric, positive-definite square matrix
Ainto the Cholesky decomposition (or
(or
 for the complex case). On input, the values from the diagonal and lower-triangular
part of the matrix
for the complex case). On input, the values from the diagonal and lower-triangular
part of the matrix Aare used (the upper triangular part is ignored). On output the diagonal and lower triangular part of the input matrixAcontain the matrix, while the upper triangular part contains the original matrix. If the matrix is not
positive-definite then the decomposition will fail, returning the
error code GSL_EDOM.When testing whether a matrix is positive-definite, disable the error handler first to avoid triggering an error. These functions use Level 3 BLAS to compute the Cholesky factorization (Peise and Bientinesi, 2016).
-
int gsl_linalg_cholesky_decomp(gsl_matrix *A)¶
This function is now deprecated and is provided only for backward compatibility.
-
int gsl_linalg_cholesky_solve(const gsl_matrix *cholesky, const gsl_vector *b, gsl_vector *x)¶
-
int gsl_linalg_complex_cholesky_solve(const gsl_matrix_complex *cholesky, const gsl_vector_complex *b, gsl_vector_complex *x)¶
These functions solve the system
using the Cholesky
decomposition of held in the matrix choleskywhich must have been previously computed bygsl_linalg_cholesky_decomp()orgsl_linalg_complex_cholesky_decomp().
-
int gsl_linalg_cholesky_svx(const gsl_matrix *cholesky, gsl_vector *x)¶
-
int gsl_linalg_complex_cholesky_svx(const gsl_matrix_complex *cholesky, gsl_vector_complex *x)¶
These functions solve the system
in-place using the
Cholesky decomposition of held in the matrix choleskywhich must have been previously computed bygsl_linalg_cholesky_decomp()orgsl_linalg_complex_cholesky_decomp(). On inputxshould contain the right-hand side, which is replaced by the
solution on output.
-
int gsl_linalg_cholesky_invert(gsl_matrix *cholesky)¶
-
int gsl_linalg_complex_cholesky_invert(gsl_matrix_complex *cholesky)¶
These functions compute the inverse of a matrix from its Cholesky decomposition
cholesky, which must have been previously computed bygsl_linalg_cholesky_decomp()orgsl_linalg_complex_cholesky_decomp(). On output, the inverse is stored in-place incholesky.
-
int gsl_linalg_cholesky_decomp2(gsl_matrix *A, gsl_vector *S)¶
-
int gsl_linalg_complex_cholesky_decomp2(gsl_matrix_complex *A, gsl_vector *S)¶
This function calculates a diagonal scaling transformation
for
the symmetric, positive-definite square matrix A, and then computes the Cholesky decomposition .
On input, the values from the diagonal and lower-triangular part of the matrix
.
On input, the values from the diagonal and lower-triangular part of the matrix Aare used (the upper triangular part is ignored). On output the diagonal and lower triangular part of the input matrixAcontain the matrix.
If the matrix is not positive-definite then the decomposition will fail, returning the
error code GSL_EDOM. The diagonal scale factors are stored inSon output.When testing whether a matrix is positive-definite, disable the error handler first to avoid triggering an error.
-
int gsl_linalg_cholesky_solve2(const gsl_matrix *cholesky, const gsl_vector *S, const gsl_vector *b, gsl_vector *x)¶
-
int gsl_linalg_complex_cholesky_solve2(const gsl_matrix_complex *cholesky, const gsl_vector *S, const gsl_vector_complex *b, gsl_vector_complex *x)¶
This function solves the system
 using the Cholesky
decomposition of
using the Cholesky
decomposition of  held in the matrix
held in the matrix choleskywhich must have been previously computed bygsl_linalg_cholesky_decomp2()orgsl_linalg_complex_cholesky_decomp2().
-
int gsl_linalg_cholesky_svx2(const gsl_matrix *cholesky, const gsl_vector *S, gsl_vector *x)¶
-
int gsl_linalg_complex_cholesky_svx2(const gsl_matrix_complex *cholesky, const gsl_vector *S, gsl_vector_complex *x)¶
This function solves the system
in-place using the
Cholesky decomposition of held in the matrix choleskywhich must have been previously computed bygsl_linalg_cholesky_decomp2()orgsl_linalg_complex_cholesky_decomp2(). On inputxshould contain the right-hand side, which is replaced by the
solution on output.
-
int gsl_linalg_cholesky_scale(const gsl_matrix *A, gsl_vector *S)¶
-
int gsl_linalg_complex_cholesky_scale(const gsl_matrix_complex *A, gsl_vector *S)¶
This function calculates a diagonal scaling transformation of the symmetric, positive definite matrix
A, such that has a condition number within a factor of
of the matrix of smallest possible condition number over all
possible diagonal scalings. On output, Scontains the scale factors, given by .
For any
.
For any  , the corresponding scale factor
, the corresponding scale factor  is set to
is set to  .
.
-
int gsl_linalg_cholesky_scale_apply(gsl_matrix *A, const gsl_vector *S)¶
-
int gsl_linalg_complex_cholesky_scale_apply(gsl_matrix_complex *A, const gsl_vector *S)¶
This function applies the scaling transformation
Sto the matrixA. On output,Ais replaced by.
-
int gsl_linalg_cholesky_rcond(const gsl_matrix *cholesky, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the symmetric positive definite matrix
, using its Cholesky decomposition provided in cholesky. The reciprocal condition number estimate, defined as , is stored
in
, is stored
in rcond. Additional workspace of size is required in work.
Pivoted Cholesky Decomposition¶
A symmetric positive semi-definite square matrix has an alternate
Cholesky decomposition into a product of a lower unit triangular matrix ,
a diagonal matrix and , given by  . For
postive definite matrices, this is equivalent to the Cholesky formulation discussed
above, with the standard Cholesky lower triangular factor given by
. For
postive definite matrices, this is equivalent to the Cholesky formulation discussed
above, with the standard Cholesky lower triangular factor given by  .
For ill-conditioned matrices, it can help to use a pivoting strategy to
prevent the entries of and from growing too large, and also
ensure
.
For ill-conditioned matrices, it can help to use a pivoting strategy to
prevent the entries of and from growing too large, and also
ensure  , where
, where  are
the diagonal entries of . The final decomposition is given by
are
the diagonal entries of . The final decomposition is given by

where is a permutation matrix.
-
int gsl_linalg_pcholesky_decomp(gsl_matrix *A, gsl_permutation *p)¶
This function factors the symmetric, positive-definite square matrix
Ainto the Pivoted Cholesky decomposition .
On input, the values from the diagonal and lower-triangular part of the matrix
.
On input, the values from the diagonal and lower-triangular part of the matrix Aare used to construct the factorization. On output the diagonal of the input matrixAstores the diagonal elements of, and the lower triangular portion of Acontains the matrix. Since has ones on its diagonal these
do not need to be explicitely stored. The upper triangular portion of Ais unmodified. The permutation matrix is stored in pon output.
-
int gsl_linalg_pcholesky_solve(const gsl_matrix *LDLT, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x)¶
This function solves the system
using the Pivoted Cholesky
decomposition of held in the matrix LDLTand permutationpwhich must have been previously computed bygsl_linalg_pcholesky_decomp().
-
int gsl_linalg_pcholesky_svx(const gsl_matrix *LDLT, const gsl_permutation *p, gsl_vector *x)¶
This function solves the system
in-place using the Pivoted Cholesky
decomposition of held in the matrix LDLTand permutationpwhich must have been previously computed bygsl_linalg_pcholesky_decomp(). On input,xcontains the right hand side vector which is
replaced by the solution vector on output.
-
int gsl_linalg_pcholesky_decomp2(gsl_matrix *A, gsl_permutation *p, gsl_vector *S)¶
This function computes the pivoted Cholesky factorization of the matrix
, where the input matrix Ais symmetric and positive definite, and the diagonal scaling matrixSis computed to reduce the condition number ofAas much as possible. See Cholesky Decomposition for more information on the matrixS. The Pivoted Cholesky decomposition satisfies .
On input, the values from the diagonal and lower-triangular part of the matrix
.
On input, the values from the diagonal and lower-triangular part of the matrix Aare used to construct the factorization. On output the diagonal of the input matrixAstores the diagonal elements of, and the lower triangular portion of Acontains the matrix. Since has ones on its diagonal these
do not need to be explicitely stored. The upper triangular portion of Ais unmodified. The permutation matrix is stored in pon output. The diagonal scaling transformation is stored inSon output.
-
int gsl_linalg_pcholesky_solve2(const gsl_matrix *LDLT, const gsl_permutation *p, const gsl_vector *S, const gsl_vector *b, gsl_vector *x)¶
This function solves the system
using the Pivoted Cholesky
decomposition of held in the matrix LDLT, permutationp, and vectorS, which must have been previously computed bygsl_linalg_pcholesky_decomp2().
-
int gsl_linalg_pcholesky_svx2(const gsl_matrix *LDLT, const gsl_permutation *p, const gsl_vector *S, gsl_vector *x)¶
This function solves the system
in-place using the Pivoted Cholesky
decomposition of held in the matrix LDLT, permutationpand vectorS, which must have been previously computed bygsl_linalg_pcholesky_decomp2(). On input,xcontains the right hand side vector which is
replaced by the solution vector on output.
-
int gsl_linalg_pcholesky_invert(const gsl_matrix *LDLT, const gsl_permutation *p, gsl_matrix *Ainv)¶
This function computes the inverse of the matrix
, using the Pivoted
Cholesky decomposition stored in LDLTandp. On output, the matrixAinvcontains .
.
-
int gsl_linalg_pcholesky_rcond(const gsl_matrix *LDLT, const gsl_permutation *p, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the symmetric positive definite matrix
, using its pivoted Cholesky decomposition provided in LDLT. The reciprocal condition number estimate, defined as, is stored
in rcond. Additional workspace of size is required in work.
Modified Cholesky Decomposition¶
The modified Cholesky decomposition is suitable for solving systems
where is a symmetric indefinite matrix. Such
matrices arise in nonlinear optimization algorithms. The standard
Cholesky decomposition requires a positive definite matrix and would
fail in this case. Instead of resorting to a method like QR or SVD,
which do not take into account the symmetry of the matrix, we can
instead introduce a small perturbation to the matrix to
make it positive definite, and then use a Cholesky decomposition on
the perturbed matrix. The resulting decomposition satisfies

where is a permutation matrix,  is a diagonal
perturbation matrix, is unit lower triangular, and
is diagonal. If is sufficiently positive
definite, then the perturbation matrix will be zero
and this method is equivalent to the pivoted Cholesky algorithm.
For indefinite matrices, the perturbation matrix is
computed to ensure that
is a diagonal
perturbation matrix, is unit lower triangular, and
is diagonal. If is sufficiently positive
definite, then the perturbation matrix will be zero
and this method is equivalent to the pivoted Cholesky algorithm.
For indefinite matrices, the perturbation matrix is
computed to ensure that  is positive definite and
well conditioned.
is positive definite and
well conditioned.
-
int gsl_linalg_mcholesky_decomp(gsl_matrix *A, gsl_permutation *p, gsl_vector *E)¶
This function factors the symmetric, indefinite square matrix
Ainto the Modified Cholesky decomposition .
On input, the values from the diagonal and lower-triangular part of the matrix
.
On input, the values from the diagonal and lower-triangular part of the matrix Aare used to construct the factorization. On output the diagonal of the input matrixAstores the diagonal elements of, and the lower triangular portion of Acontains the matrix. Since has ones on its diagonal these
do not need to be explicitely stored. The upper triangular portion of Ais unmodified. The permutation matrix is
stored in pon output. The diagonal perturbation matrix is stored inEon output. The parameterEmay be set to NULL if it is not required.
-
int gsl_linalg_mcholesky_solve(const gsl_matrix *LDLT, const gsl_permutation *p, const gsl_vector *b, gsl_vector *x)¶
This function solves the perturbed system
 using the Cholesky
decomposition of held in the matrix
using the Cholesky
decomposition of held in the matrix LDLTand permutationpwhich must have been previously computed bygsl_linalg_mcholesky_decomp().
-
int gsl_linalg_mcholesky_svx(const gsl_matrix *LDLT, const gsl_permutation *p, gsl_vector *x)¶
This function solves the perturbed system
in-place using the Cholesky
decomposition of held in the matrix LDLTand permutationpwhich must have been previously computed bygsl_linalg_mcholesky_decomp(). On input,xcontains the right hand side vector which is
replaced by the solution vector on output.
-
int gsl_linalg_mcholesky_rcond(const gsl_matrix *LDLT, const gsl_permutation *p, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the perturbed matrix
, using its pivoted Cholesky decomposition provided in LDLT. The reciprocal condition number estimate, defined as , is stored
in
, is stored
in rcond. Additional workspace of size is required in work.
LDLT Decomposition¶
If is a symmetric, nonsingular square matrix, then it has a unique
factorization of the form

where is a unit lower triangular matrix and is diagonal.
If is positive definite, then this factorization is equivalent
to the Cholesky factorization, where the lower triangular Cholesky factor
is  . Some indefinite matrices for which no
Cholesky decomposition exists have an decomposition
with negative entries in . The algorithm
is sometimes referred to as the square root free Cholesky
decomposition, as the algorithm does not require the computation of
square roots. The algorithm is stable for positive definite matrices,
but is not guaranteed to be stable for indefinite matrices.
. Some indefinite matrices for which no
Cholesky decomposition exists have an decomposition
with negative entries in . The algorithm
is sometimes referred to as the square root free Cholesky
decomposition, as the algorithm does not require the computation of
square roots. The algorithm is stable for positive definite matrices,
but is not guaranteed to be stable for indefinite matrices.
-
int gsl_linalg_ldlt_decomp(gsl_matrix *A)¶
This function factorizes the symmetric, non-singular square matrix
Ainto the decomposition .
On input, the values from the diagonal and lower-triangular
part of the matrix
.
On input, the values from the diagonal and lower-triangular
part of the matrix Aare used. The upper triangle ofAis used as temporary workspace. On output the diagonal ofAcontains the matrix and the lower
triangle of Acontains the unit lower triangular matrix.
The matrix 1-norm,  is stored in the upper right corner
on output, for later use by
is stored in the upper right corner
on output, for later use by gsl_linalg_ldlt_rcond().If the matrix is detected to be singular, the function returns the error code
GSL_EDOM.
-
int gsl_linalg_ldlt_solve(const gsl_matrix *LDLT, const gsl_vector *b, gsl_vector *x)¶
This function solves the system
using the
decomposition of held in the matrix LDLTwhich must have been previously computed bygsl_linalg_ldlt_decomp().
-
int gsl_linalg_ldlt_svx(const gsl_matrix *LDLT, gsl_vector *x)¶
This function solves the system
in-place using the
decomposition of held in the matrix LDLTwhich must have been previously computed bygsl_linalg_ldlt_decomp(). On inputxshould contain the right-hand side, which is replaced by the
solution on output.
-
int gsl_linalg_ldlt_rcond(const gsl_matrix *LDLT, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the symmetric nonsingular matrix
, using its decomposition provided in LDLT. The reciprocal condition number estimate, defined as, is stored
in rcond. Additional workspace of size is required in work.
Tridiagonal Decomposition of Real Symmetric Matrices¶
A symmetric matrix can be factorized by similarity
transformations into the form,

where is an orthogonal matrix and is a symmetric
tridiagonal matrix.
-
int gsl_linalg_symmtd_decomp(gsl_matrix *A, gsl_vector *tau)¶
This function factorizes the symmetric square matrix
Ainto the symmetric tridiagonal decomposition . On output the
diagonal and subdiagonal part of the input matrix
. On output the
diagonal and subdiagonal part of the input matrix Acontain the tridiagonal matrix. The remaining lower triangular part of the
input matrix contains the Householder vectors which, together with the
Householder coefficients tau, encode the orthogonal matrix. This storage scheme is the same as used by LAPACK. The
upper triangular part of Ais not referenced.
-
int gsl_linalg_symmtd_unpack(const gsl_matrix *A, const gsl_vector *tau, gsl_matrix *Q, gsl_vector *diag, gsl_vector *subdiag)¶
This function unpacks the encoded symmetric tridiagonal decomposition (
A,tau) obtained fromgsl_linalg_symmtd_decomp()into the orthogonal matrixQ, the vector of diagonal elementsdiagand the vector of subdiagonal elementssubdiag.
-
int gsl_linalg_symmtd_unpack_T(const gsl_matrix *A, gsl_vector *diag, gsl_vector *subdiag)¶
This function unpacks the diagonal and subdiagonal of the encoded symmetric tridiagonal decomposition (
A,tau) obtained fromgsl_linalg_symmtd_decomp()into the vectorsdiagandsubdiag.
Tridiagonal Decomposition of Hermitian Matrices¶
A hermitian matrix can be factorized by similarity
transformations into the form,

where is a unitary matrix and is a real symmetric
tridiagonal matrix.
-
int gsl_linalg_hermtd_decomp(gsl_matrix_complex *A, gsl_vector_complex *tau)¶
This function factorizes the hermitian matrix
Ainto the symmetric tridiagonal decomposition . On output the real parts of
the diagonal and subdiagonal part of the input matrix
. On output the real parts of
the diagonal and subdiagonal part of the input matrix Acontain the tridiagonal matrix. The remaining lower triangular part of
the input matrix contains the Householder vectors which, together with
the Householder coefficients tau, encode the unitary matrix. This storage scheme is the same as used by LAPACK. The
upper triangular part of Aand imaginary parts of the diagonal are not referenced.
-
int gsl_linalg_hermtd_unpack(const gsl_matrix_complex *A, const gsl_vector_complex *tau, gsl_matrix_complex *U, gsl_vector *diag, gsl_vector *subdiag)¶
This function unpacks the encoded tridiagonal decomposition (
A,tau) obtained fromgsl_linalg_hermtd_decomp()into the unitary matrixU, the real vector of diagonal elementsdiagand the real vector of subdiagonal elementssubdiag.
-
int gsl_linalg_hermtd_unpack_T(const gsl_matrix_complex *A, gsl_vector *diag, gsl_vector *subdiag)¶
This function unpacks the diagonal and subdiagonal of the encoded tridiagonal decomposition (
A,tau) obtained from thegsl_linalg_hermtd_decomp()into the real vectorsdiagandsubdiag.
Hessenberg Decomposition of Real Matrices¶
A general real matrix can be decomposed by orthogonal
similarity transformations into the form

where is orthogonal and  is an upper Hessenberg matrix,
meaning that it has zeros below the first subdiagonal. The
Hessenberg reduction is the first step in the Schur decomposition
for the nonsymmetric eigenvalue problem, but has applications in
other areas as well.
is an upper Hessenberg matrix,
meaning that it has zeros below the first subdiagonal. The
Hessenberg reduction is the first step in the Schur decomposition
for the nonsymmetric eigenvalue problem, but has applications in
other areas as well.
-
int gsl_linalg_hessenberg_decomp(gsl_matrix *A, gsl_vector *tau)¶
This function computes the Hessenberg decomposition of the matrix
Aby applying the similarity transformation .
On output, is stored in the upper portion of
.
On output, is stored in the upper portion of A. The information required to construct the matrix is stored in
the lower triangular portion of A. is a product
of  Householder matrices. The Householder vectors
are stored in the lower portion of
Householder matrices. The Householder vectors
are stored in the lower portion of A(below the subdiagonal) and the Householder coefficients are stored in the vectortau.taumust be of lengthN.
-
int gsl_linalg_hessenberg_unpack(gsl_matrix *H, gsl_vector *tau, gsl_matrix *U)¶
This function constructs the orthogonal matrix
from the
information stored in the Hessenberg matrix Halong with the vectortau.Handtauare outputs fromgsl_linalg_hessenberg_decomp().
-
int gsl_linalg_hessenberg_unpack_accum(gsl_matrix *H, gsl_vector *tau, gsl_matrix *V)¶
This function is similar to
gsl_linalg_hessenberg_unpack(), except it accumulates the matrixUintoV, so that .
The matrix
.
The matrix Vmust be initialized prior to calling this function. SettingVto the identity matrix provides the same result asgsl_linalg_hessenberg_unpack(). IfHis orderN, thenVmust haveNcolumns but may have any number of rows.
-
int gsl_linalg_hessenberg_set_zero(gsl_matrix *H)¶
This function sets the lower triangular portion of
H, below the subdiagonal, to zero. It is useful for clearing out the Householder vectors after callinggsl_linalg_hessenberg_decomp().
Hessenberg-Triangular Decomposition of Real Matrices¶
A general real matrix pair (,  ) can be decomposed by
orthogonal similarity transformations into the form
) can be decomposed by
orthogonal similarity transformations into the form

where and are orthogonal, is an upper
Hessenberg matrix, and is upper triangular. The
Hessenberg-Triangular reduction is the first step in the generalized
Schur decomposition for the generalized eigenvalue problem.
-
int gsl_linalg_hesstri_decomp(gsl_matrix *A, gsl_matrix *B, gsl_matrix *U, gsl_matrix *V, gsl_vector *work)¶
This function computes the Hessenberg-Triangular decomposition of the matrix pair (
A,B). On output, is stored in A, and is stored in B. IfUandVare provided (they may be null), the similarity transformations are stored in them. Additional workspace of length is needed in work.
Bidiagonalization¶
A general matrix can be factorized by similarity
transformations into the form,

where and are orthogonal matrices and is a
-by- bidiagonal matrix with non-zero entries only on the
diagonal and superdiagonal. The size of U is -by-
and the size of V is -by-.
-
int gsl_linalg_bidiag_decomp(gsl_matrix *A, gsl_vector *tau_U, gsl_vector *tau_V)¶
This function factorizes the
-by- matrix Ainto bidiagonal form . The diagonal and superdiagonal of the
matrix are stored in the diagonal and superdiagonal of
. The diagonal and superdiagonal of the
matrix are stored in the diagonal and superdiagonal of A. The orthogonal matrices and Vare stored as compressed Householder vectors in the remaining elements ofA. The Householder coefficients are stored in the vectorstau_Uandtau_V. The length oftau_Umust equal the number of elements in the diagonal ofAand the length oftau_Vshould be one element shorter.
-
int gsl_linalg_bidiag_unpack(const gsl_matrix *A, const gsl_vector *tau_U, gsl_matrix *U, const gsl_vector *tau_V, gsl_matrix *V, gsl_vector *diag, gsl_vector *superdiag)¶
This function unpacks the bidiagonal decomposition of
Aproduced bygsl_linalg_bidiag_decomp(), (A,tau_U,tau_V) into the separate orthogonal matricesU,Vand the diagonal vectordiagand superdiagonalsuperdiag. Note thatUis stored as a compact-by- orthogonal matrix satisfying
 for efficiency.
for efficiency.
-
int gsl_linalg_bidiag_unpack2(gsl_matrix *A, gsl_vector *tau_U, gsl_vector *tau_V, gsl_matrix *V)¶
This function unpacks the bidiagonal decomposition of
Aproduced bygsl_linalg_bidiag_decomp(), (A,tau_U,tau_V) into the separate orthogonal matricesU,Vand the diagonal vectordiagand superdiagonalsuperdiag. The matrixUis stored in-place inA.
-
int gsl_linalg_bidiag_unpack_B(const gsl_matrix *A, gsl_vector *diag, gsl_vector *superdiag)¶
This function unpacks the diagonal and superdiagonal of the bidiagonal decomposition of
Afromgsl_linalg_bidiag_decomp(), into the diagonal vectordiagand superdiagonal vectorsuperdiag.
Givens Rotations¶
A Givens rotation is a rotation in the plane acting on two elements of a given vector. It can be represented in matrix form as
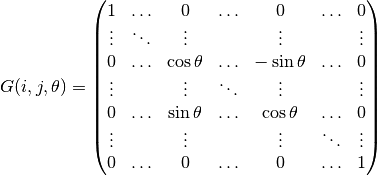
where the  and
and  appear at
the intersection of the
appear at
the intersection of the  -th and -th rows and columns.
When acting on a vector ,
-th and -th rows and columns.
When acting on a vector ,  performs
a rotation of the
performs
a rotation of the  elements of . Givens
rotations are typically used to introduce zeros in
vectors, such as during the QR decomposition of a matrix. In this
case, it is typically desired to find
elements of . Givens
rotations are typically used to introduce zeros in
vectors, such as during the QR decomposition of a matrix. In this
case, it is typically desired to find  and
and  such that
such that
with  .
.
-
void gsl_linalg_givens(const double a, const double b, double *c, double *s)¶
This function computes
 and
and  so that the Givens matrix
so that the Givens matrix  acting on the
vector
acting on the
vector  produces
produces  , with .
, with .
-
void gsl_linalg_givens_gv(gsl_vector *v, const size_t i, const size_t j, const double c, const double s)¶
This function applies the Givens rotation defined by
and to the iandjelements ofv. On output, .
.
Householder Transformations¶
A Householder transformation is a rank-1 modification of the identity
matrix which can be used to zero out selected elements of a vector. A
Householder matrix takes the form,

where  is a vector (called the Householder vector) and
is a vector (called the Householder vector) and
 . The functions described in this section use the
rank-1 structure of the Householder matrix to create and apply
Householder transformations efficiently.
. The functions described in this section use the
rank-1 structure of the Householder matrix to create and apply
Householder transformations efficiently.
-
double gsl_linalg_householder_transform(gsl_vector *w)¶
-
gsl_complex gsl_linalg_complex_householder_transform(gsl_vector_complex *w)¶
This function prepares a Householder transformation
 which can be used to zero all the elements of the input vector
which can be used to zero all the elements of the input vector wexcept the first. On output the Householder vectorvis stored inwand the scalar is returned. The householder vector
is returned. The householder vector
vis normalized so thatv[0] = 1, however this 1 is not stored in the output vector. Instead,w[0]is set to the first element of the transformed vector, so that if ,
, w[0] = u[0]on output and the remainder of is zero.
is zero.
-
int gsl_linalg_householder_hm(double tau, const gsl_vector *v, gsl_matrix *A)¶
-
int gsl_linalg_complex_householder_hm(gsl_complex tau, const gsl_vector_complex *v, gsl_matrix_complex *A)¶
This function applies the Householder matrix
defined by the
scalar tauand the vectorvto the left-hand side of the matrixA. On output the result is stored in
is stored in A.
-
int gsl_linalg_householder_mh(double tau, const gsl_vector *v, gsl_matrix *A)¶
-
int gsl_linalg_complex_householder_mh(gsl_complex tau, const gsl_vector_complex *v, gsl_matrix_complex *A)¶
This function applies the Householder matrix
defined by the
scalar tauand the vectorvto the right-hand side of the matrixA. On output the result is stored in
is stored in A.
-
int gsl_linalg_householder_hv(double tau, const gsl_vector *v, gsl_vector *w)¶
-
int gsl_linalg_complex_householder_hv(gsl_complex tau, const gsl_vector_complex *v, gsl_vector_complex *w)¶
This function applies the Householder transformation
defined by
the scalar tauand the vectorvto the vectorw. On output the result is stored in
is stored in w.
Householder solver for linear systems¶
-
int gsl_linalg_HH_solve(gsl_matrix *A, const gsl_vector *b, gsl_vector *x)¶
This function solves the system
directly using
Householder transformations. On output the solution is stored in xandbis not modified. The matrixAis destroyed by the Householder transformations.
-
int gsl_linalg_HH_svx(gsl_matrix *A, gsl_vector *x)¶
This function solves the system
in-place using
Householder transformations. On input xshould contain the right-hand side, which is replaced by the solution on output. The
matrix Ais destroyed by the Householder transformations.
Tridiagonal Systems¶
The functions described in this section efficiently solve symmetric,
non-symmetric and cyclic tridiagonal systems with minimal storage.
Note that the current implementations of these functions use a variant
of Cholesky decomposition, so the tridiagonal matrix must be positive
definite. For non-positive definite matrices, the functions return
the error code GSL_ESING.
-
int gsl_linalg_solve_tridiag(const gsl_vector *diag, const gsl_vector *e, const gsl_vector *f, const gsl_vector *b, gsl_vector *x)¶
This function solves the general
-by- system
where Ais tridiagonal ( ).
The super-diagonal and
sub-diagonal vectors
).
The super-diagonal and
sub-diagonal vectors eandfmust be one element shorter than the diagonal vectordiag. The form ofAfor the 4-by-4 case is shown below,
-
int gsl_linalg_solve_symm_tridiag(const gsl_vector *diag, const gsl_vector *e, const gsl_vector *b, gsl_vector *x)¶
This function solves the general
-by- system
where Ais symmetric tridiagonal ().
The off-diagonal vector
emust be one element shorter than the diagonal vectordiag. The form ofAfor the 4-by-4 case is shown below,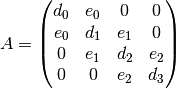
-
int gsl_linalg_solve_cyc_tridiag(const gsl_vector *diag, const gsl_vector *e, const gsl_vector *f, const gsl_vector *b, gsl_vector *x)¶
This function solves the general
-by- system
where Ais cyclic tridiagonal ( ).
The cyclic super-diagonal and
sub-diagonal vectors
).
The cyclic super-diagonal and
sub-diagonal vectors eandfmust have the same number of elements as the diagonal vectordiag. The form ofAfor the 4-by-4 case is shown below,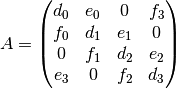
-
int gsl_linalg_solve_symm_cyc_tridiag(const gsl_vector *diag, const gsl_vector *e, const gsl_vector *b, gsl_vector *x)¶
This function solves the general
-by- system
where Ais symmetric cyclic tridiagonal ().
The cyclic
off-diagonal vector emust have the same number of elements as the diagonal vectordiag. The form ofAfor the 4-by-4 case is shown below,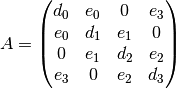
Triangular Systems¶
-
int gsl_linalg_tri_invert(CBLAS_UPLO_t Uplo, CBLAS_DIAG_t Diag, gsl_matrix *T)¶
-
int gsl_linalg_complex_tri_invert(CBLAS_UPLO_t Uplo, CBLAS_DIAG_t Diag, gsl_matrix_complex *T)¶
These functions compute the in-place inverse of the triangular matrix
T, stored in the lower triangle whenUplo=CblasLowerand upper triangle whenUplo=CblasUpper. The parameterDiag=CblasUnit,CblasNonUnitspecifies whether the matrix is unit triangular.
-
int gsl_linalg_tri_LTL(gsl_matrix *L)¶
-
int gsl_linalg_complex_tri_LHL(gsl_matrix_complex *L)¶
These functions compute the product
 (or
(or  )
in-place and stores it in the lower triangle of
)
in-place and stores it in the lower triangle of Lon output.
-
int gsl_linalg_tri_UL(gsl_matrix *LU)¶
-
int gsl_linalg_complex_tri_UL(gsl_matrix_complex *LU)¶
These functions compute the product
 where is upper
triangular and is unit lower triangular, stored in
where is upper
triangular and is unit lower triangular, stored in LU, as computed bygsl_linalg_LU_decomp()orgsl_linalg_complex_LU_decomp(). The product is computed in-place using Level 3 BLAS.
-
int gsl_linalg_tri_rcond(CBLAS_UPLO_t Uplo, const gsl_matrix *A, double *rcond, gsl_vector *work)¶
This function estimates the 1-norm reciprocal condition number of the triangular matrix
A, using the lower triangle whenUploisCblasLowerand upper triangle whenUploisCblasUpper. The reciprocal condition number is stored in
is stored in rcondon output. Additional workspace of size is required
in
is required
in work.
Banded Systems¶
Band matrices are sparse matrices whose non-zero entries are confined to a diagonal band. From a storage point of view, significant savings can be achieved by storing only the non-zero diagonals of a banded matrix. Algorithms such as LU and Cholesky factorizations preserve the band structure of these matrices. Computationally, working with compact banded matrices is preferable to working on the full dense matrix with many zero entries.
General Banded Format¶
An example of a general banded matrix is given below.
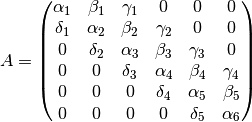
This matrix has a lower bandwidth of 1 and an upper bandwidth of 2.
The lower bandwidth is the number of non-zero subdiagonals, and the
upper bandwidth is the number of non-zero superdiagonals. A
 banded matrix has a lower bandwidth
banded matrix has a lower bandwidth  and
upper bandwidth
and
upper bandwidth  . For example, diagonal matrices are
. For example, diagonal matrices are
 , tridiagonal matrices are
, tridiagonal matrices are  , and
upper triangular matrices are
, and
upper triangular matrices are  banded matrices.
banded matrices.
The corresponding  -by-
-by- packed banded matrix looks like
packed banded matrix looks like
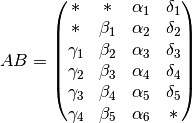
where the superdiagonals are stored in columns, followed by the diagonal,
followed by the subdiagonals.
The entries marked by  are not referenced by the banded
routines. With this format, each row of
are not referenced by the banded
routines. With this format, each row of  corresponds to
the non-zero entries of the corresponding column of .
For an -by- matrix , the dimension
of will be -by-
corresponds to
the non-zero entries of the corresponding column of .
For an -by- matrix , the dimension
of will be -by- .
.
Symmetric Banded Format¶
Symmetric banded matrices allow for additional storage savings.
As an example, consider the following  symmetric banded matrix
with lower bandwidth
symmetric banded matrix
with lower bandwidth  :
:
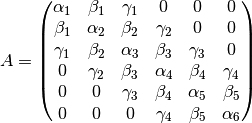
The packed symmetric banded  matrix will look like:
matrix will look like:
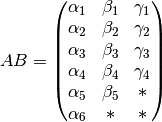
The entries marked by are not referenced by the symmetric banded
routines. The relationship between the packed format and original matrix is,

for  . Conversely,
. Conversely,

for  .
.
Warning
Note that this format is the transpose of the symmetric banded format used by LAPACK. In order to develop efficient routines for symmetric banded matrices, it helps to have the nonzero elements in each column in contiguous memory locations. Since C uses row-major order, GSL stores the columns in the rows of the packed banded format, while LAPACK, written in Fortran, uses the transposed format.
Banded LU Decomposition¶
The routines in this section are designed to factor banded
-by- matrices with an LU factorization,
 . The matrix is banded of type
, i.e. a lower bandwidth of and an upper
bandwidth of . See LU Decomposition
for more information on the factorization. For banded
matrices, the factor will have an upper bandwidth of
. The matrix is banded of type
, i.e. a lower bandwidth of and an upper
bandwidth of . See LU Decomposition
for more information on the factorization. For banded
matrices, the factor will have an upper bandwidth of
 , while the factor will have a lower bandwidth of
at most . Therefore, additional storage is needed to store the
additional bands of .
, while the factor will have a lower bandwidth of
at most . Therefore, additional storage is needed to store the
additional bands of .
As an example, consider the  matrix with
lower bandwidth
matrix with
lower bandwidth  and upper bandwidth
and upper bandwidth  ,
,
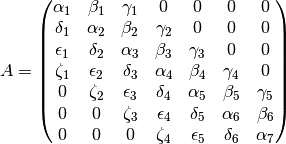
The corresponding -by- packed banded matrix looks like
packed banded matrix looks like
Entries marked with  are used to store the additional diagonals of the
factor. Entries marked with are not referenced by the banded routines.
are used to store the additional diagonals of the
factor. Entries marked with are not referenced by the banded routines.
-
int gsl_linalg_LU_band_decomp(const size_t M, const size_t lb, const size_t ub, gsl_matrix *AB, gsl_vector_uint *piv)¶
This function computes the LU factorization of the banded matrix
ABwhich is stored in packed band format (see above) and has dimension-by-. The
number of rows of the original matrix is provided in M. The lower bandwidth is provided in lband the upper bandwidth is provided in ub. The vectorpivhas length and stores the pivot indices on output (for
and stores the pivot indices on output (for  , row of the matrix
was interchanged with row
, row of the matrix
was interchanged with row piv[i]). On output,ABcontains both the and factors
in packed format.
-
int gsl_linalg_LU_band_solve(const size_t lb, const size_t ub, const gsl_matrix *LUB, const gsl_vector_uint *piv, const gsl_vector *b, gsl_vector *x)¶
This function solves the square system
 using the banded LU factorization
(
using the banded LU factorization
(LUB,piv) computed bygsl_linalg_LU_band_decomp(). The lower and upper bandwidths are provided inlbandubrespectively. The right hand side vector is provided inb. The solution vector is stored inxon output.
-
int gsl_linalg_LU_band_svx(const size_t lb, const size_t ub, const gsl_matrix *LUB, const gsl_vector_uint *piv, gsl_vector *x)¶
This function solves the square system
in-place, using the banded LU factorization
(LUB,piv) computed bygsl_linalg_LU_band_decomp(). The lower and upper bandwidths are provided inlbandubrespectively. On input, the right hand side vector is provided in x, which is replaced by the solution vector on output.
-
int gsl_linalg_LU_band_unpack(const size_t M, const size_t lb, const size_t ub, const gsl_matrix *LUB, const gsl_vector_uint *piv, gsl_matrix *L, gsl_matrix *U)¶
This function unpacks the banded LU factorization (
LUB,piv) previously computed bygsl_linalg_LU_band_decomp()into the matricesLandU. The matrixUhas dimension-by- and stores
the upper triangular factor on output. The matrix Lhas dimension-by- and stores the matrix  on output.
on output.
Banded Cholesky Decomposition¶
The routines in this section are designed to factor and solve
-by- linear systems of the form
where is a banded, symmetric, and positive definite matrix
with lower bandwidth . See
Cholesky Decomposition for more
information on the factorization. The lower triangular
factor of the Cholesky decomposition preserves the same
banded structure as the matrix , enabling an efficient
algorithm which overwrites the original matrix with the
factor.
-
int gsl_linalg_cholesky_band_decomp(gsl_matrix *A)¶
This function factorizes the symmetric, positive-definite square matrix
Ainto the Cholesky decomposition. The input matrix
Ais given in symmetric banded format, and has dimensions-by- , where is the lower bandwidth of the matrix.
On output, the entries of
, where is the lower bandwidth of the matrix.
On output, the entries of Aare replaced by the entries of the matrix in the same format. In addition, the lower right element of Ais used to store the matrix 1-norm, used later bygsl_linalg_cholesky_band_rcond()to calculate the reciprocal condition number.If the matrix is not positive-definite then the decomposition will fail, returning the error code
GSL_EDOM. When testing whether a matrix is positive-definite, disable the error handler first to avoid triggering an error.
-
int gsl_linalg_cholesky_band_solve(const gsl_matrix *LLT, const gsl_vector *b, gsl_vector *x)¶
-
int gsl_linalg_cholesky_band_solvem(const gsl_matrix *LLT, const gsl_matrix *B, gsl_matrix *X)¶
This function solves the symmetric banded system
(or  ) using the Cholesky
decomposition of held in the matrix
) using the Cholesky
decomposition of held in the matrix LLTwhich must have been previously computed bygsl_linalg_cholesky_band_decomp().
-
int gsl_linalg_cholesky_band_svx(const gsl_matrix *LLT, gsl_vector *x)¶
-
int gsl_linalg_cholesky_band_svxm(const gsl_matrix *LLT, gsl_matrix *X)¶
This function solves the symmetric banded system
(or ) in-place using the
Cholesky decomposition of held in the matrix LLTwhich must have been previously computed bygsl_linalg_cholesky_band_decomp(). On inputx(orX) should contain the right-hand side (or ),
which is replaced by the solution on output.
-
int gsl_linalg_cholesky_band_invert(const gsl_matrix *LLT, gsl_matrix *Ainv)¶
This function computes the inverse of a symmetric banded matrix from its Cholesky decomposition
LLT, which must have been previously computed bygsl_linalg_cholesky_band_decomp(). On output, the inverse is stored inAinv, using both the lower and upper portions.
-
int gsl_linalg_cholesky_band_unpack(const gsl_matrix *LLT, gsl_matrix *L)¶
This function unpacks the lower triangular Cholesky factor from
LLTand stores it in the lower triangular portion of the-by- matrix L. The upper triangular portion ofLis not referenced.
-
int gsl_linalg_cholesky_band_scale(const gsl_matrix *A, gsl_vector *S)¶
This function calculates a diagonal scaling transformation of the symmetric, positive definite banded matrix
A, such that has a condition number within a factor of
of the matrix of smallest possible condition number over all
possible diagonal scalings. On output, Scontains the scale factors, given by.
For any , the corresponding scale factor
is set to .
-
int gsl_linalg_cholesky_band_scale_apply(gsl_matrix *A, const gsl_vector *S)¶
This function applies the scaling transformation
Sto the banded symmetric positive definite matrixA. On output,Ais replaced by.
-
int gsl_linalg_cholesky_band_rcond(const gsl_matrix *LLT, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the symmetric banded positive definite matrix
, using its Cholesky decomposition provided in LLT. The reciprocal condition number estimate, defined as, is stored
in rcond. Additional workspace of size is required in work.
Banded LDLT Decomposition¶
The routines in this section are designed to factor and solve
-by- linear systems of the form
where is a banded, symmetric, and non-singular matrix
with lower bandwidth . See LDLT Decomposition
for more information on the factorization. The lower triangular
factor of the decomposition preserves the same
banded structure as the matrix , enabling an efficient
algorithm which overwrites the original matrix with the
and factors.
-
int gsl_linalg_ldlt_band_decomp(gsl_matrix *A)¶
This function factorizes the symmetric, non-singular square matrix
Ainto the decomposition. The input matrix
Ais given in symmetric banded format, and has dimensions-by-, where is the lower bandwidth of the matrix.
On output, the entries of Aare replaced by the entries of the matrices and in the same format.If the matrix is singular then the decomposition will fail, returning the error code
GSL_EDOM.
-
int gsl_linalg_ldlt_band_solve(const gsl_matrix *LDLT, const gsl_vector *b, gsl_vector *x)¶
This function solves the symmetric banded system
using the
decomposition of held in the matrix LDLTwhich must have been previously computed bygsl_linalg_ldlt_band_decomp().
-
int gsl_linalg_ldlt_band_svx(const gsl_matrix *LDLT, gsl_vector *x)¶
This function solves the symmetric banded system
in-place using the
decomposition of held in the matrix LDLTwhich must have been previously computed bygsl_linalg_ldlt_band_decomp(). On inputxshould contain the right-hand side, which is replaced by the
solution on output.
-
int gsl_linalg_ldlt_band_unpack(const gsl_matrix *LDLT, gsl_matrix *L, gsl_vector *D)¶
This function unpacks the unit lower triangular factor
from LDLTand stores it in the lower triangular portion of the-by- matrix L. The upper triangular portion ofLis not referenced. The diagonal matrix is stored in the vector D.
-
int gsl_linalg_ldlt_band_rcond(const gsl_matrix *LDLT, double *rcond, gsl_vector *work)¶
This function estimates the reciprocal condition number (using the 1-norm) of the symmetric banded nonsingular matrix
, using its decomposition provided in LDLT. The reciprocal condition number estimate, defined as, is stored
in rcond. Additional workspace of size is required in work.
Balancing¶
The process of balancing a matrix applies similarity transformations
to make the rows and columns have comparable norms. This is
useful, for example, to reduce roundoff errors in the solution
of eigenvalue problems. Balancing a matrix consists
of replacing with a similar matrix

where is a diagonal matrix whose entries are powers
of the floating point radix.
-
int gsl_linalg_balance_matrix(gsl_matrix *A, gsl_vector *D)¶
This function replaces the matrix
Awith its balanced counterpart and stores the diagonal elements of the similarity transformation into the vectorD.
Examples¶
The following program solves the linear system . The
system to be solved is,
and the solution is found using LU decomposition of the matrix .
#include <stdio.h>
#include <gsl/gsl_linalg.h>
int
main (void)
{
double a_data[] = { 0.18, 0.60, 0.57, 0.96,
0.41, 0.24, 0.99, 0.58,
0.14, 0.30, 0.97, 0.66,
0.51, 0.13, 0.19, 0.85 };
double b_data[] = { 1.0, 2.0, 3.0, 4.0 };
gsl_matrix_view m
= gsl_matrix_view_array (a_data, 4, 4);
gsl_vector_view b
= gsl_vector_view_array (b_data, 4);
gsl_vector *x = gsl_vector_alloc (4);
int s;
gsl_permutation * p = gsl_permutation_alloc (4);
gsl_linalg_LU_decomp (&m.matrix, p, &s);
gsl_linalg_LU_solve (&m.matrix, p, &b.vector, x);
printf ("x = \n");
gsl_vector_fprintf (stdout, x, "%g");
gsl_permutation_free (p);
gsl_vector_free (x);
return 0;
}
Here is the output from the program,
x =
-4.05205
-12.6056
1.66091
8.69377
This can be verified by multiplying the solution by the
original matrix using GNU octave,
octave> A = [ 0.18, 0.60, 0.57, 0.96;
0.41, 0.24, 0.99, 0.58;
0.14, 0.30, 0.97, 0.66;
0.51, 0.13, 0.19, 0.85 ];
octave> x = [ -4.05205; -12.6056; 1.66091; 8.69377];
octave> A * x
ans =
1.0000
2.0000
3.0000
4.0000
This reproduces the original right-hand side vector, , in
accordance with the equation .
References and Further Reading¶
Further information on the algorithms described in this section can be found in the following book,
G. H. Golub, C. F. Van Loan, “Matrix Computations” (3rd Ed, 1996), Johns Hopkins University Press, ISBN 0-8018-5414-8.
The LAPACK library is described in the following manual,
LAPACK Users’ Guide (Third Edition, 1999), Published by SIAM, ISBN 0-89871-447-8
The LAPACK source code can be found at http://www.netlib.org/lapack, along with an online copy of the users guide.
Further information on recursive Level 3 BLAS algorithms may be found in the following paper,
E. Peise and P. Bientinesi, “Recursive algorithms for dense linear algebra: the ReLAPACK collection”, http://arxiv.org/abs/1602.06763, 2016.
The recursive Level 3 BLAS QR decomposition is described in the following paper,
E. Elmroth and F. G. Gustavson, 2000. Applying recursion to serial and parallel QR factorization leads to better performance. IBM Journal of Research and Development, 44(4), pp.605-624.
The Modified Golub-Reinsch algorithm is described in the following paper,
T.F. Chan, “An Improved Algorithm for Computing the Singular Value Decomposition”, ACM Transactions on Mathematical Software, 8 (1982), pp 72–83.
The Jacobi algorithm for singular value decomposition is described in the following papers,
J.C. Nash, “A one-sided transformation method for the singular value decomposition and algebraic eigenproblem”, Computer Journal, Volume 18, Number 1 (1975), p 74–76
J.C. Nash and S. Shlien “Simple algorithms for the partial singular value decomposition”, Computer Journal, Volume 30 (1987), p 268–275.
J. Demmel, K. Veselic, “Jacobi’s Method is more accurate than QR”, Lapack Working Note 15 (LAWN-15), October 1989. Available from netlib, http://www.netlib.org/lapack/ in the
lawnsorlawnspdfdirectories.
The algorithm for estimating a matrix condition number is described in the following paper,
N. J. Higham, “FORTRAN codes for estimating the one-norm of a real or complex matrix, with applications to condition estimation”, ACM Trans. Math. Soft., vol. 14, no. 4, pp. 381-396, December 1988.