Multidimensional Minimization¶
This chapter describes routines for finding minima of arbitrary multidimensional functions. The library provides low level components for a variety of iterative minimizers and convergence tests. These can be combined by the user to achieve the desired solution, while providing full access to the intermediate steps of the algorithms. Each class of methods uses the same framework, so that you can switch between minimizers at runtime without needing to recompile your program. Each instance of a minimizer keeps track of its own state, allowing the minimizers to be used in multi-threaded programs. The minimization algorithms can be used to maximize a function by inverting its sign.
The header file gsl_multimin.h contains prototypes for the
minimization functions and related declarations.
Overview¶
The problem of multidimensional minimization requires finding a point
 such that the scalar function,
such that the scalar function,

takes a value which is lower than at any neighboring point. For smooth
functions the gradient  vanishes at the minimum. In
general there are no bracketing methods available for the
minimization of
vanishes at the minimum. In
general there are no bracketing methods available for the
minimization of  -dimensional functions. The algorithms
proceed from an initial guess using a search algorithm which attempts
to move in a downhill direction.
-dimensional functions. The algorithms
proceed from an initial guess using a search algorithm which attempts
to move in a downhill direction.
Algorithms making use of the gradient of the function perform a
one-dimensional line minimisation along this direction until the lowest
point is found to a suitable tolerance. The search direction is then
updated with local information from the function and its derivatives,
and the whole process repeated until the true -dimensional
minimum is found.
Algorithms which do not require the gradient of the function use
different strategies. For example, the Nelder-Mead Simplex algorithm
maintains  trial parameter vectors as the vertices of a
-dimensional simplex. On each iteration it tries to improve
the worst vertex of the simplex by geometrical transformations. The
iterations are continued until the overall size of the simplex has
decreased sufficiently.
trial parameter vectors as the vertices of a
-dimensional simplex. On each iteration it tries to improve
the worst vertex of the simplex by geometrical transformations. The
iterations are continued until the overall size of the simplex has
decreased sufficiently.
Both types of algorithms use a standard framework. The user provides a high-level driver for the algorithms, and the library provides the individual functions necessary for each of the steps. There are three main phases of the iteration. The steps are,
initialize minimizer state,
s, for algorithmTupdate
susing the iterationTtest
sfor convergence, and repeat iteration if necessary
Each iteration step consists either of an improvement to the
line-minimisation in the current direction or an update to the search
direction itself. The state for the minimizers is held in a
gsl_multimin_fdfminimizer struct or a
gsl_multimin_fminimizer struct.
Caveats¶
Note that the minimization algorithms can only search for one local minimum at a time. When there are several local minima in the search area, the first minimum to be found will be returned; however it is difficult to predict which of the minima this will be. In most cases, no error will be reported if you try to find a local minimum in an area where there is more than one.
It is also important to note that the minimization algorithms find local minima; there is no way to determine whether a minimum is a global minimum of the function in question.
Initializing the Multidimensional Minimizer¶
The following function initializes a multidimensional minimizer. The minimizer itself depends only on the dimension of the problem and the algorithm and can be reused for different problems.
-
type gsl_multimin_fdfminimizer¶
This is a workspace for minimizing functions using derivatives.
-
type gsl_multimin_fminimizer¶
This is a workspace for minimizing functions without derivatives.
-
gsl_multimin_fdfminimizer *gsl_multimin_fdfminimizer_alloc(const gsl_multimin_fdfminimizer_type *T, size_t n)¶
-
gsl_multimin_fminimizer *gsl_multimin_fminimizer_alloc(const gsl_multimin_fminimizer_type *T, size_t n)¶
This function returns a pointer to a newly allocated instance of a minimizer of type
Tfor ann-dimension function. If there is insufficient memory to create the minimizer then the function returns a null pointer and the error handler is invoked with an error code ofGSL_ENOMEM.
-
int gsl_multimin_fdfminimizer_set(gsl_multimin_fdfminimizer *s, gsl_multimin_function_fdf *fdf, const gsl_vector *x, double step_size, double tol)¶
-
int gsl_multimin_fminimizer_set(gsl_multimin_fminimizer *s, gsl_multimin_function *f, const gsl_vector *x, const gsl_vector *step_size)¶
The function
gsl_multimin_fdfminimizer_set()initializes the minimizersto minimize the functionfdfstarting from the initial pointx. The size of the first trial step is given bystep_size. The accuracy of the line minimization is specified bytol. The precise meaning of this parameter depends on the method used. Typically the line minimization is considered successful if the gradient of the function is
orthogonal to the current search direction
is
orthogonal to the current search direction  to a relative
accuracy of
to a relative
accuracy of tol, where .
A
.
A tolvalue of 0.1 is suitable for most purposes, since line minimization only needs to be carried out approximately. Note that settingtolto zero will force the use of “exact” line-searches, which are extremely expensive.The function
gsl_multimin_fminimizer_set()initializes the minimizersto minimize the functionf, starting from the initial pointx. The size of the initial trial steps is given in vectorstep_size. The precise meaning of this parameter depends on the method used.
-
void gsl_multimin_fdfminimizer_free(gsl_multimin_fdfminimizer *s)¶
-
void gsl_multimin_fminimizer_free(gsl_multimin_fminimizer *s)¶
This function frees all the memory associated with the minimizer
s.
-
const char *gsl_multimin_fdfminimizer_name(const gsl_multimin_fdfminimizer *s)¶
-
const char *gsl_multimin_fminimizer_name(const gsl_multimin_fminimizer *s)¶
This function returns a pointer to the name of the minimizer. For example:
printf ("s is a '%s' minimizer\n", gsl_multimin_fdfminimizer_name (s));
would print something like
s is a 'conjugate_pr' minimizer.
Providing a function to minimize¶
You must provide a parametric function of variables for the
minimizers to operate on. You may also need to provide a routine which
calculates the gradient of the function and a third routine which
calculates both the function value and the gradient together. In order
to allow for general parameters the functions are defined by the
following data types:
-
type gsl_multimin_function_fdf¶
This data type defines a general function of
variables with
parameters and the corresponding gradient vector of derivatives,double (* f) (const gsl_vector * x, void * params)this function should return the result
 for argument
for argument xand parametersparams. If the function cannot be computed, an error value ofGSL_NANshould be returned.void (* df) (const gsl_vector * x, void * params, gsl_vector * g)this function should store the
n-dimensional gradient
in the vector
gfor argumentxand parametersparams, returning an appropriate error code if the function cannot be computed.void (* fdf) (const gsl_vector * x, void * params, double * f, gsl_vector * g)This function should set the values of the
fandgas above, for argumentsxand parametersparams. This function provides an optimization of the separate functions for and
and
 —it is always faster to compute the function and its
derivative at the same time.
—it is always faster to compute the function and its
derivative at the same time.size_t nthe dimension of the system, i.e. the number of components of the vectors
x.void * paramsa pointer to the parameters of the function.
-
type gsl_multimin_function¶
This data type defines a general function of
variables with
parameters,double (* f) (const gsl_vector * x, void * params)this function should return the result
for argument xand parametersparams. If the function cannot be computed, an error value ofGSL_NANshould be returned.size_t nthe dimension of the system, i.e. the number of components of the vectors
x.void * paramsa pointer to the parameters of the function.
The following example function defines a simple two-dimensional paraboloid with five parameters,
/* Paraboloid centered on (p[0],p[1]), with
scale factors (p[2],p[3]) and minimum p[4] */
double
my_f (const gsl_vector *v, void *params)
{
double x, y;
double *p = (double *)params;
x = gsl_vector_get(v, 0);
y = gsl_vector_get(v, 1);
return p[2] * (x - p[0]) * (x - p[0]) +
p[3] * (y - p[1]) * (y - p[1]) + p[4];
}
/* The gradient of f, df = (df/dx, df/dy). */
void
my_df (const gsl_vector *v, void *params,
gsl_vector *df)
{
double x, y;
double *p = (double *)params;
x = gsl_vector_get(v, 0);
y = gsl_vector_get(v, 1);
gsl_vector_set(df, 0, 2.0 * p[2] * (x - p[0]));
gsl_vector_set(df, 1, 2.0 * p[3] * (y - p[1]));
}
/* Compute both f and df together. */
void
my_fdf (const gsl_vector *x, void *params,
double *f, gsl_vector *df)
{
*f = my_f(x, params);
my_df(x, params, df);
}
The function can be initialized using the following code:
gsl_multimin_function_fdf my_func;
/* Paraboloid center at (1,2), scale factors (10, 20),
minimum value 30 */
double p[5] = { 1.0, 2.0, 10.0, 20.0, 30.0 };
my_func.n = 2; /* number of function components */
my_func.f = &my_f;
my_func.df = &my_df;
my_func.fdf = &my_fdf;
my_func.params = (void *)p;
Iteration¶
The following function drives the iteration of each algorithm. The function performs one iteration to update the state of the minimizer. The same function works for all minimizers so that different methods can be substituted at runtime without modifications to the code.
-
int gsl_multimin_fdfminimizer_iterate(gsl_multimin_fdfminimizer *s)¶
-
int gsl_multimin_fminimizer_iterate(gsl_multimin_fminimizer *s)¶
These functions perform a single iteration of the minimizer
s. If the iteration encounters an unexpected problem then an error code will be returned. The error codeGSL_ENOPROGsignifies that the minimizer is unable to improve on its current estimate, either due to numerical difficulty or because a genuine local minimum has been reached.
The minimizer maintains a current best estimate of the minimum at all times. This information can be accessed with the following auxiliary functions,
-
gsl_vector *gsl_multimin_fdfminimizer_x(const gsl_multimin_fdfminimizer *s)¶
-
gsl_vector *gsl_multimin_fminimizer_x(const gsl_multimin_fminimizer *s)¶
-
double gsl_multimin_fdfminimizer_minimum(const gsl_multimin_fdfminimizer *s)¶
-
double gsl_multimin_fminimizer_minimum(const gsl_multimin_fminimizer *s)¶
-
gsl_vector *gsl_multimin_fdfminimizer_gradient(const gsl_multimin_fdfminimizer *s)¶
-
gsl_vector *gsl_multimin_fdfminimizer_dx(const gsl_multimin_fdfminimizer *s)¶
-
double gsl_multimin_fminimizer_size(const gsl_multimin_fminimizer *s)¶
These functions return the current best estimate of the location of the minimum, the value of the function at that point, its gradient, the last step increment of the estimate, and minimizer specific characteristic size for the minimizer
s.
-
int gsl_multimin_fdfminimizer_restart(gsl_multimin_fdfminimizer *s)¶
This function resets the minimizer
sto use the current point as a new starting point.
Stopping Criteria¶
A minimization procedure should stop when one of the following conditions is true:
A minimum has been found to within the user-specified precision.
A user-specified maximum number of iterations has been reached.
An error has occurred.
The handling of these conditions is under user control. The functions below allow the user to test the precision of the current result.
-
int gsl_multimin_test_gradient(const gsl_vector *g, double epsabs)¶
This function tests the norm of the gradient
gagainst the absolute toleranceepsabs. The gradient of a multidimensional function goes to zero at a minimum. The test returnsGSL_SUCCESSif the following condition is achieved,
and returns
GSL_CONTINUEotherwise. A suitable choice ofepsabscan be made from the desired accuracy in the function for small variations in. The relationship between these quantities
is given by  .
.
-
int gsl_multimin_test_size(const double size, double epsabs)¶
This function tests the minimizer specific characteristic size (if applicable to the used minimizer) against absolute tolerance
epsabs. The test returnsGSL_SUCCESSif the size is smaller than tolerance, otherwiseGSL_CONTINUEis returned.
Algorithms with Derivatives¶
There are several minimization methods available. The best choice of algorithm depends on the problem. The algorithms described in this section use the value of the function and its gradient at each evaluation point.
-
type gsl_multimin_fdfminimizer_type¶
This type specifies a minimization algorithm using gradients.
-
gsl_multimin_fdfminimizer_type *gsl_multimin_fdfminimizer_conjugate_fr¶
This is the Fletcher-Reeves conjugate gradient algorithm. The conjugate gradient algorithm proceeds as a succession of line minimizations. The sequence of search directions is used to build up an approximation to the curvature of the function in the neighborhood of the minimum.
An initial search direction
pis chosen using the gradient, and line minimization is carried out in that direction. The accuracy of the line minimization is specified by the parametertol. The minimum along this line occurs when the function gradientgand the search directionpare orthogonal. The line minimization terminates when . The
search direction is updated using the Fletcher-Reeves formula
. The
search direction is updated using the Fletcher-Reeves formula
 where
where  , and
the line minimization is then repeated for the new search
direction.
, and
the line minimization is then repeated for the new search
direction.
-
gsl_multimin_fdfminimizer_type *gsl_multimin_fdfminimizer_conjugate_pr¶
This is the Polak-Ribiere conjugate gradient algorithm. It is similar to the Fletcher-Reeves method, differing only in the choice of the coefficient
 . Both methods work well when the evaluation
point is close enough to the minimum of the objective function that it
is well approximated by a quadratic hypersurface.
. Both methods work well when the evaluation
point is close enough to the minimum of the objective function that it
is well approximated by a quadratic hypersurface.
-
gsl_multimin_fdfminimizer_type *gsl_multimin_fdfminimizer_vector_bfgs2¶
-
gsl_multimin_fdfminimizer_type *gsl_multimin_fdfminimizer_vector_bfgs¶
These methods use the vector Broyden-Fletcher-Goldfarb-Shanno (BFGS) algorithm. This is a quasi-Newton method which builds up an approximation to the second derivatives of the function
 using the difference
between successive gradient vectors. By combining the first and second
derivatives the algorithm is able to take Newton-type steps towards the
function minimum, assuming quadratic behavior in that region.
using the difference
between successive gradient vectors. By combining the first and second
derivatives the algorithm is able to take Newton-type steps towards the
function minimum, assuming quadratic behavior in that region.The
bfgs2version of this minimizer is the most efficient version available, and is a faithful implementation of the line minimization scheme described in Fletcher’s Practical Methods of Optimization, Algorithms 2.6.2 and 2.6.4. It supersedes the originalbfgsroutine and requires substantially fewer function and gradient evaluations. The user-supplied tolerancetolcorresponds to the parameter used by Fletcher. A value
of 0.1 is recommended for typical use (larger values correspond to
less accurate line searches).
used by Fletcher. A value
of 0.1 is recommended for typical use (larger values correspond to
less accurate line searches).
-
gsl_multimin_fdfminimizer_type *gsl_multimin_fdfminimizer_steepest_descent¶
The steepest descent algorithm follows the downhill gradient of the function at each step. When a downhill step is successful the step-size is increased by a factor of two. If the downhill step leads to a higher function value then the algorithm backtracks and the step size is decreased using the parameter
tol. A suitable value oftolfor most applications is 0.1. The steepest descent method is inefficient and is included only for demonstration purposes.
-
gsl_multimin_fdfminimizer_type *gsl_multimin_fdfminimizer_conjugate_fr¶
Algorithms without Derivatives¶
The algorithms described in this section use only the value of the function at each evaluation point.
-
type gsl_multimin_fminimizer_type¶
This type specifies minimization algorithms which do not use gradients.
-
gsl_multimin_fminimizer_type *gsl_multimin_fminimizer_nmsimplex2¶
-
gsl_multimin_fminimizer_type *gsl_multimin_fminimizer_nmsimplex¶
These methods use the Simplex algorithm of Nelder and Mead. Starting from the initial vector
 , the algorithm
constructs an additional vectors
, the algorithm
constructs an additional vectors  using the step size vector
using the step size vector  as follows:
as follows: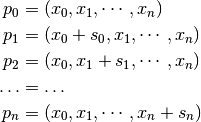
These vectors form the
vertices of a simplex in
dimensions. On each iteration the algorithm uses simple geometrical
transformations to update the vector corresponding to the highest
function value. The geometric transformations are reflection,
reflection followed by expansion, contraction and multiple
contraction. Using these transformations the simplex moves through
the space towards the minimum, where it contracts itself.After each iteration, the best vertex is returned. Note, that due to the nature of the algorithm not every step improves the current best parameter vector. Usually several iterations are required.
The minimizer-specific characteristic size is calculated as the average distance from the geometrical center of the simplex to all its vertices. This size can be used as a stopping criteria, as the simplex contracts itself near the minimum. The size is returned by the function
gsl_multimin_fminimizer_size().The
gsl_multimin_fminimizer_nmsimplex2version of this minimiser is a new operations
implementation of the earlier
operations
implementation of the earlier  operations
operations
gsl_multimin_fminimizer_nmsimplexminimiser. It uses the same underlying algorithm, but the simplex updates are computed more efficiently for high-dimensional problems. In addition, the size of simplex is calculated as the RMS distance of each vertex from the center rather than the mean distance, allowing a linear update of this quantity on each step. The memory usage is for both algorithms.
-
gsl_multimin_fminimizer_type *gsl_multimin_fminimizer_nmsimplex2rand¶
This method is a variant of
gsl_multimin_fminimizer_nmsimplex2which initialises the simplex around the starting pointxusing a randomly-oriented set of basis vectors instead of the fixed coordinate axes. The final dimensions of the simplex are scaled along the coordinate axes by the vectorstep_size. The randomisation uses a simple deterministic generator so that repeated calls togsl_multimin_fminimizer_set()for a given solver object will vary the orientation in a well-defined way.
-
gsl_multimin_fminimizer_type *gsl_multimin_fminimizer_nmsimplex2¶
Examples¶
This example program finds the minimum of the paraboloid function
defined earlier. The location of the minimum is offset from the origin
in and  , and the function value at the minimum is
non-zero. The main program is given below, it requires the example
function given earlier in this chapter.
, and the function value at the minimum is
non-zero. The main program is given below, it requires the example
function given earlier in this chapter.
int
main (void)
{
size_t iter = 0;
int status;
const gsl_multimin_fdfminimizer_type *T;
gsl_multimin_fdfminimizer *s;
/* Position of the minimum (1,2), scale factors
10,20, height 30. */
double par[5] = { 1.0, 2.0, 10.0, 20.0, 30.0 };
gsl_vector *x;
gsl_multimin_function_fdf my_func;
my_func.n = 2;
my_func.f = my_f;
my_func.df = my_df;
my_func.fdf = my_fdf;
my_func.params = par;
/* Starting point, x = (5,7) */
x = gsl_vector_alloc (2);
gsl_vector_set (x, 0, 5.0);
gsl_vector_set (x, 1, 7.0);
T = gsl_multimin_fdfminimizer_conjugate_fr;
s = gsl_multimin_fdfminimizer_alloc (T, 2);
gsl_multimin_fdfminimizer_set (s, &my_func, x, 0.01, 1e-4);
do
{
iter++;
status = gsl_multimin_fdfminimizer_iterate (s);
if (status)
break;
status = gsl_multimin_test_gradient (s->gradient, 1e-3);
if (status == GSL_SUCCESS)
printf ("Minimum found at:\n");
printf ("%5d %.5f %.5f %10.5f\n", iter,
gsl_vector_get (s->x, 0),
gsl_vector_get (s->x, 1),
s->f);
}
while (status == GSL_CONTINUE && iter < 100);
gsl_multimin_fdfminimizer_free (s);
gsl_vector_free (x);
return 0;
}
The initial step-size is chosen as 0.01, a conservative estimate in this case, and the line minimization parameter is set at 0.0001. The program terminates when the norm of the gradient has been reduced below 0.001. The output of the program is shown below,
x y f
1 4.99629 6.99072 687.84780
2 4.98886 6.97215 683.55456
3 4.97400 6.93501 675.01278
4 4.94429 6.86073 658.10798
5 4.88487 6.71217 625.01340
6 4.76602 6.41506 561.68440
7 4.52833 5.82083 446.46694
8 4.05295 4.63238 261.79422
9 3.10219 2.25548 75.49762
10 2.85185 1.62963 67.03704
11 2.19088 1.76182 45.31640
12 0.86892 2.02622 30.18555
Minimum found at:
13 1.00000 2.00000 30.00000
Note that the algorithm gradually increases the step size as it successfully moves downhill, as can be seen by plotting the successive points in Fig. 29.
Fig. 29 Function contours with path taken by minimization algorithm¶
The conjugate gradient algorithm finds the minimum on its second direction because the function is purely quadratic. Additional iterations would be needed for a more complicated function.
Here is another example using the Nelder-Mead Simplex algorithm to minimize the same example object function, as above.
int
main(void)
{
double par[5] = {1.0, 2.0, 10.0, 20.0, 30.0};
const gsl_multimin_fminimizer_type *T =
gsl_multimin_fminimizer_nmsimplex2;
gsl_multimin_fminimizer *s = NULL;
gsl_vector *ss, *x;
gsl_multimin_function minex_func;
size_t iter = 0;
int status;
double size;
/* Starting point */
x = gsl_vector_alloc (2);
gsl_vector_set (x, 0, 5.0);
gsl_vector_set (x, 1, 7.0);
/* Set initial step sizes to 1 */
ss = gsl_vector_alloc (2);
gsl_vector_set_all (ss, 1.0);
/* Initialize method and iterate */
minex_func.n = 2;
minex_func.f = my_f;
minex_func.params = par;
s = gsl_multimin_fminimizer_alloc (T, 2);
gsl_multimin_fminimizer_set (s, &minex_func, x, ss);
do
{
iter++;
status = gsl_multimin_fminimizer_iterate(s);
if (status)
break;
size = gsl_multimin_fminimizer_size (s);
status = gsl_multimin_test_size (size, 1e-2);
if (status == GSL_SUCCESS)
{
printf ("converged to minimum at\n");
}
printf ("%5d %10.3e %10.3e f() = %7.3f size = %.3f\n",
iter,
gsl_vector_get (s->x, 0),
gsl_vector_get (s->x, 1),
s->fval, size);
}
while (status == GSL_CONTINUE && iter < 100);
gsl_vector_free(x);
gsl_vector_free(ss);
gsl_multimin_fminimizer_free (s);
return status;
}
The minimum search stops when the Simplex size drops to 0.01. The output is shown below.
1 6.500e+00 5.000e+00 f() = 512.500 size = 1.130
2 5.250e+00 4.000e+00 f() = 290.625 size = 1.409
3 5.250e+00 4.000e+00 f() = 290.625 size = 1.409
4 5.500e+00 1.000e+00 f() = 252.500 size = 1.409
5 2.625e+00 3.500e+00 f() = 101.406 size = 1.847
6 2.625e+00 3.500e+00 f() = 101.406 size = 1.847
7 0.000e+00 3.000e+00 f() = 60.000 size = 1.847
8 2.094e+00 1.875e+00 f() = 42.275 size = 1.321
9 2.578e-01 1.906e+00 f() = 35.684 size = 1.069
10 5.879e-01 2.445e+00 f() = 35.664 size = 0.841
11 1.258e+00 2.025e+00 f() = 30.680 size = 0.476
12 1.258e+00 2.025e+00 f() = 30.680 size = 0.367
13 1.093e+00 1.849e+00 f() = 30.539 size = 0.300
14 8.830e-01 2.004e+00 f() = 30.137 size = 0.172
15 8.830e-01 2.004e+00 f() = 30.137 size = 0.126
16 9.582e-01 2.060e+00 f() = 30.090 size = 0.106
17 1.022e+00 2.004e+00 f() = 30.005 size = 0.063
18 1.022e+00 2.004e+00 f() = 30.005 size = 0.043
19 1.022e+00 2.004e+00 f() = 30.005 size = 0.043
20 1.022e+00 2.004e+00 f() = 30.005 size = 0.027
21 1.022e+00 2.004e+00 f() = 30.005 size = 0.022
22 9.920e-01 1.997e+00 f() = 30.001 size = 0.016
23 9.920e-01 1.997e+00 f() = 30.001 size = 0.013
converged to minimum at
24 9.920e-01 1.997e+00 f() = 30.001 size = 0.008
The simplex size first increases, while the simplex moves towards the minimum. After a while the size begins to decrease as the simplex contracts around the minimum.
References and Further Reading¶
The conjugate gradient and BFGS methods are described in detail in the following book,
R. Fletcher, Practical Methods of Optimization (Second Edition) Wiley (1987), ISBN 0471915475.
A brief description of multidimensional minimization algorithms and more recent references can be found in,
C.W. Ueberhuber, Numerical Computation (Volume 2), Chapter 14, Section 4.4 “Minimization Methods”, p.: 325–335, Springer (1997), ISBN 3-540-62057-5.
The simplex algorithm is described in the following paper,
J.A. Nelder and R. Mead, A simplex method for function minimization, Computer Journal vol.: 7 (1965), 308–313.